

12. Частотные характеристики объектов и систем управления.
Частотными называются характеристики звеньев (систем) в форме графиков или таблиц, отображающие изменение амплитуды и фазы выходной функции (т.е. реакцию) звеньев или систем относительно синусоидального входного воздействия в установившемся режиме при изменении частоты от 0 до .
Для линейных систем справедлив ПРИНЦИП СУПЕРПОЗИЦИИ, который можно сформулировать следующим образом.
Реакция системы на несколько одновременно действующих входных воздействий равна сумме реакций на каждое воздействие в отдельности. |
Это позволяет ограничиться изучением систем только с одним входом.
В качестве входных воздействий были выбраны гармонические воздействия в виду нескольких обстоятельств
реально встречающиеся воздействия, как правило, могут быть представлены в виде суммы гармоник различных частот (разложение Фурье)
в установившихся режимах гармонические сигналы передаются линейными элементами и системами без искажений
обычно не возникает затруднений в экспериментальном исследовании поведения систем .
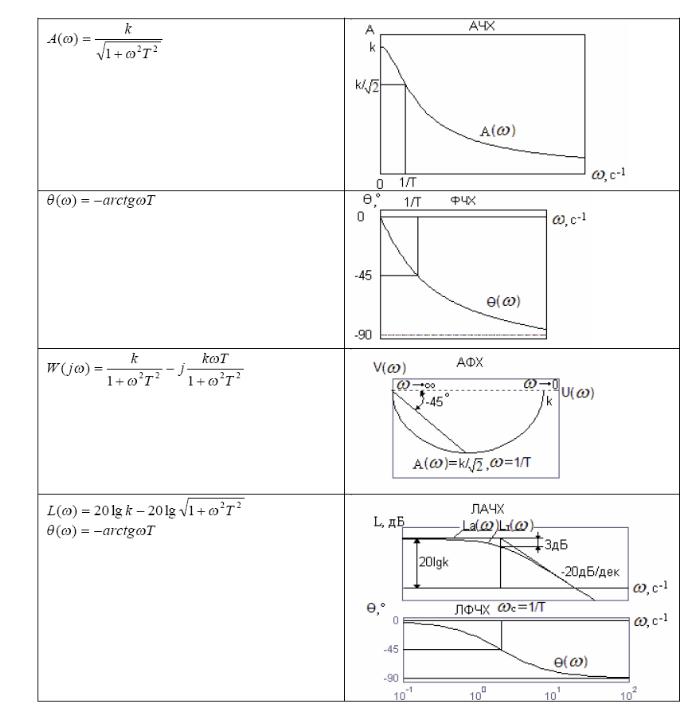
Функцию W( j) можно представить в виде
![]()
где
![]() амплитудно-частотная
функция (график АЧХ);
амплитудно-частотная
функция (график АЧХ);
![]() - фазо-частотная функция (график ФЧХ).
- фазо-частотная функция (график ФЧХ).
Если
![]() то
то
![]()
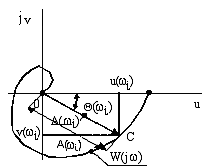
На комплексной
плоскости частотную передаточную
функцию W(jι)
определяет вектор
![]() ,
длина которого равна А(ι),
а аргумент (угол, образованный этим
вектором с действительной положительной
полуосью) - (ι).
Кривую, которую описывает конец этого
вектора при изменении частоты от 0 до
(иногда от -
до ),
называют амплитудно-фазовой частотной
характеристикой (АФХ).
,
длина которого равна А(ι),
а аргумент (угол, образованный этим
вектором с действительной положительной
полуосью) - (ι).
Кривую, которую описывает конец этого
вектора при изменении частоты от 0 до
(иногда от -
до ),
называют амплитудно-фазовой частотной
характеристикой (АФХ).
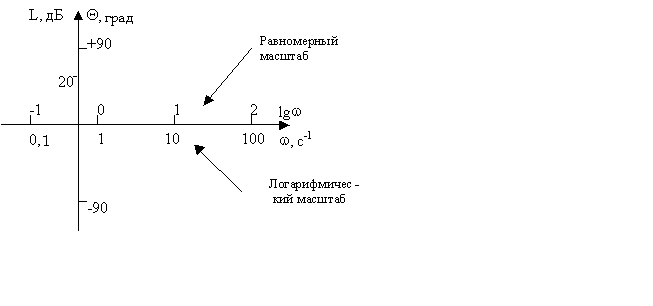
L ()= 20 lg A()= 20 lgW( j)- логарифмическая амплитудная частотная функция (график ЛАЧХ).
ЛФЧХ называют график зависимости фазового сдвига функции () от логарифма частоты lg.
Единицей измерения L() является децибел, а единицей логарифма частоты в ЛЧХ – декада. Декадой называют интервал, на котором частота изменяется в 10 раз. Ось ординат при построении ЛЧХ проводят через произвольную точку оси абсцисс, а не через точку =0. Частоте =0 соответствует бесконечно удалённая точка lg- при 0.
Белл-логарифмическая единица десятикратного увеличения мощности. Так как А()- отношение напряжений, токов, перемещений, то увеличение этого отношения в 10 раз будет соответствовать увеличению отношения мощностей в 100 раз, что соответствует 2 Белам или 20 дБ.

1мВт – базовая мощность в устройствах связи.
![]()
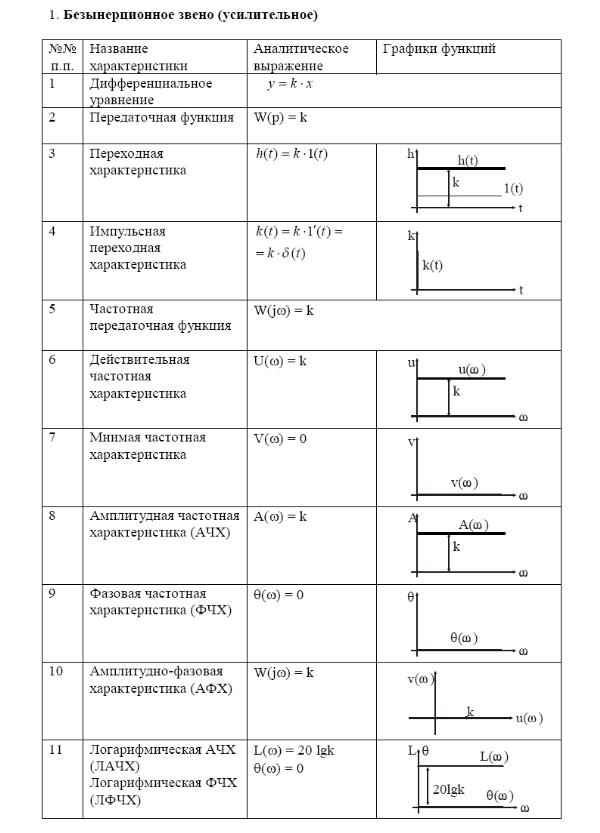
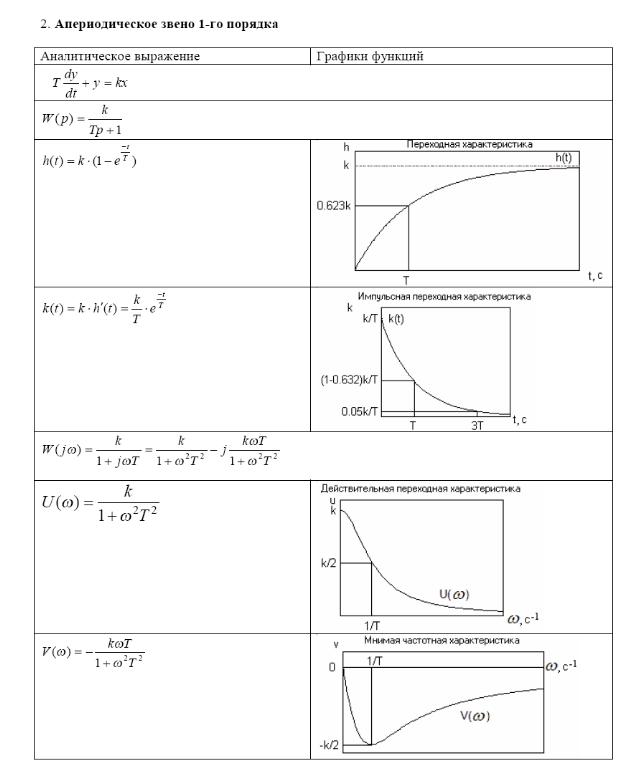
13. Типовые динамические звенья сау: безынерционное звено, апериодическое звено 1-го порядка.
14. Инерционное звено 2-го порядка.
Такие звенья описываются дифференциальным уравнением вида
![]() Преобразуем
по Лапласу это уравнение
Преобразуем
по Лапласу это уравнение
![]() или
или
![]()
Определим передаточную функцию звена

где
![]()
T – постоянная времени, с;
– коэффициент затухания (безразмерная величина);
k – передаточный коэффициент.
В зависимости от величины классифицируются звенья второго порядка по видам:
(1) (2) (3) (4) (5)


-1 0 1
1-неустойчивое апериодическое звено;
2-неустойчивое колебательное звено;
3-консервативное звено;
4-колебательное звено;
5-апериодическое звено II порядка.
>1 – апериодическое звено II-го порядка.
Характеристическое
уравнение звена
![]() имеет корни действительные и отрицательные
имеет корни действительные и отрицательные
![]() данное звено можно представить в виде
двух последовательно соединенных
звеньев с различными постоянными
времени:
данное звено можно представить в виде
двух последовательно соединенных
звеньев с различными постоянными
времени:
![]() тогда при T1>T2
переходная функция звена имеет вид
тогда при T1>T2
переходная функция звена имеет вид

Переходная характеристика:

=1,
 оба корня одинаковые и отрицательные.
оба корня одинаковые и отрицательные.
Передаточная функция преобразуема к двум последовательно соединенным апериодическим звеньям с одинаковыми постоянными времени.
W(p)=![]() ,переходная функция h(t)=1-(1+t)e-t
,где =1/T.
,переходная функция h(t)=1-(1+t)e-t
,где =1/T.
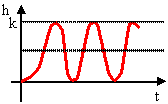
0<<1,
 корни разные, комплексно-сопряженные,
с отрицательной вещественной частью;
КОЛЕБАТЕЛЬНОЕ ЗВЕНО.
корни разные, комплексно-сопряженные,
с отрицательной вещественной частью;
КОЛЕБАТЕЛЬНОЕ ЗВЕНО.
Переходная функция звена имеет вид

где
![]() при малых ,
при малых ,
![]() - имеет физический смысл собственной
частоты колебаний,
- имеет физический смысл собственной
частоты колебаний,
![]() при малых .
при малых .
Период собственных
колебаний
![]() при малых .
при малых .
![]()

![]()
![]()

![]()
![]()

Ч ем
меньше ,
тем выше колебательность процесса:
ем
меньше ,
тем выше колебательность процесса:

=0,
 такое звено имеет специальное название
– КОНСЕРВАТИВНОЕ ЗВЕНО.
такое звено имеет специальное название
– КОНСЕРВАТИВНОЕ ЗВЕНО.
Передаточная
функция звена:
![]() .
.
Решение дифференциального уравнения имеет вид
![]() где
где
![]()
-1<<0,


Это неустойчивое колебательное звено.
<-1.
= -1; отличается от случая 6 лишь тем, что корни одинаковые.