

51. Этапы проектирования сау. Схемы включения корректирующих устройств.
СИНТЕЗ САУ – выбор структуры и параметров САУ, начальных условий и входных воздействий в соответствии с требуемыми показателями качества и условиями функционирования.
Проектирование САУ предполагает выполнение следующих этапов:
Исследование объекта регулирования: составление математической модели, определение параметров, характеристик и условий работы объекта.
Формулирование требований к САР.
Выбор принципа управления, структуры и первоначальной схемы системы.
Выбор элементов схемы регулирования с учетом статических, динамических, энергетических, эксплуатационных и др. требований.
Определение законов регулирования и расчет корректирующих устройств, обеспечивающих заданные требования.
Уточнение структурной схемы системы регулирования, выбора и расчета ее элементов и параметров.
Экспериментальное исследование системы регулирования (или отдельных ее частей) в лабораторных условиях и внесение соответствующих исправлений в ее схему и конструкцию.
Проектирование и производство системы регулирования.
Наладка системы в реальных условиях работы (опытная эксплуатация).
Проектирование САУ начинают с выбора объекта управления и основных функциональных элементов (усилителей, исполнительных устройств и др.), то есть разрабатывают силовую часть системы.
Заданные статические и динамические характеристики системы обеспечиваются соответствующим выбором структуры и параметров силовой части, специальных корректирующих устройств и всей САУ в целом.
Назначение корректирующих устройств: обеспечить требуемую точность работы системы и получить приемлемый характер переходного процесса.
Корректирующие звенья вводятся в систему различными способами: последовательно, местная ООС, прямое параллельное включение, внешние (вне контура регулирования) корректирующие устройства, охват всей САУ стабилизирующей ООС, неединичная главная обратная связь.
Типы электрических корректирующих устройств постоянного тока: активные и пассивные четырехполюсники постоянного тока, дифференцирующие трансформаторы, тахогенераторы постоянного тока, тахометрические мосты и др.
По назначению корректирующие устройства классифицируются:
СТАБИЛИЗИРУЮЩИЕ – обеспечивать устойчивость САУ и улучшать их статические и динамические характеристики.
КОМПЕНСИРУЮЩИЕ – уменьшать статические и динамические ошибки при построении САУ по комбинированному принципу.
ФИЛЬТРУЮЩИЕ – повышение помехозащищенности систем, например фильтрация высших гармоник при демодуляции сигнала прямого канала.
СПЕЦИАЛИЗИРОВАННЫЕ – для придания системе особых свойств, позволяющих улучшить показатели качества системы.
САУ могут быть построены по следующим структурным схемам:
С последовательной корректирующей цепью.
Усилитель У должен иметь большое входное сопротивление, чтобы не шунтировать выход корректирующей цепи.
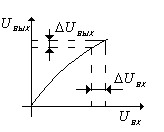
Применяется в случае медленно изменяющихся входных воздействиях, так как при больших рассогласованиях происходит насыщение в реальных нелинейных элементах, частота среза уходит влево и система медленно выходит из состояния насыщения.
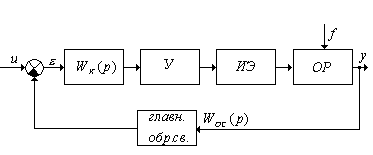
Рис.1.
Последовательная коррекция часто используется в статических системах либо для стабилизации контура с корректирующей обратной связью.
![]() -
уменьшается.
-
уменьшается.
Со встречно–параллельной корректирующей цепью.
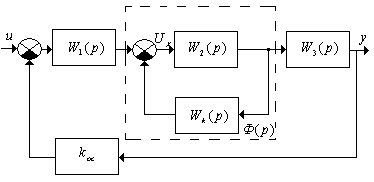
Рис.2.
![]() поступает на вход
поступает на вход
![]() как разность и глубокого насыщения не
наступает.
как разность и глубокого насыщения не
наступает.
С последовательно–параллельной корректирующей цепью.
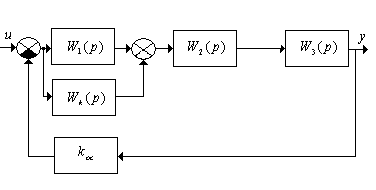
Рис.3.
С комбинированными корректирующими цепями.