

46. Типовые регуляторы: пд-регулятор.
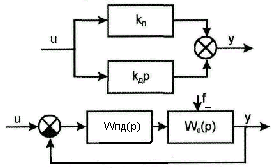
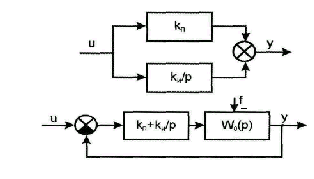
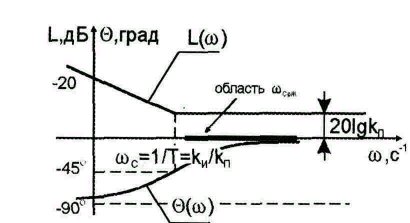
Структурная схема:
![]()
![]() – реальная
передаточная функция ПД-регулятора.
– реальная
передаточная функция ПД-регулятора.
![]() – закон регулирования.
– закон регулирования.
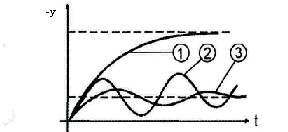
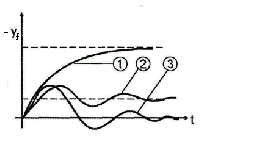
(1) – без регулятора;
(2) – П-регулятор;
(3) – ПД-регулятор.
Достоинства ПД-регулятора:
Увеличивается запас устойчивости;
Существенно улучшается качество.
регулирования (уменьшаются колебательность,
перерегулирование и время переходного
процесса).
Недостатки ПД-регулятора:
Низкая точность регулирования (статика работы
исходной системы не меняется) при kп=1;
Помехи на высоких частотах усиливаются и
нарушается работа системы за счет насыщения
усилителей;
Сложно реализуется на практике.
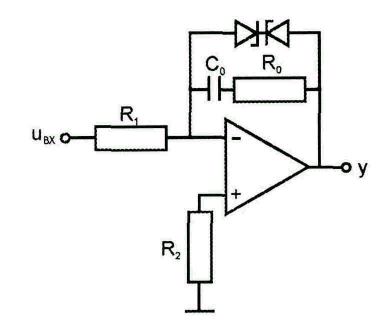
Реализация пд-регулятора
С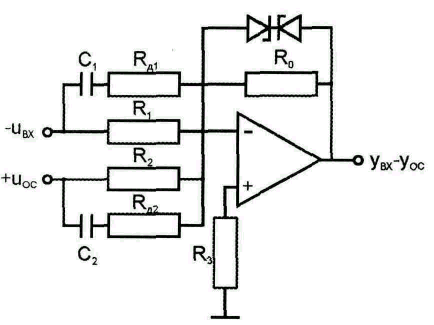 игналы
входного воздействия и обратной связи
суммируются просто.
игналы
входного воздействия и обратной связи
суммируются просто.
Если изменить знаки входного воздействия и обратной связи, то к выходу регулятора следует подключить инвертор.
Стабилитроны в обратной связи операционного усилителя предназначены для ограничения уровня выходного сигнала заданной величиной.
Во входных цепях
![]() и
и
![]() включаются по необходимости. Желательно,
чтобы
включаются по необходимости. Желательно,
чтобы
![]() .
Если исключить
.
Если исключить
![]() ,
то усилитель из-за действия помех может
войти в режим насыщения. Подбираются
,
то усилитель из-за действия помех может
войти в режим насыщения. Подбираются
![]() (величина
до 20 кОм).
(величина
до 20 кОм).
Требования к усилителю постоянного тока:
Тип усилителя, например, К140УД6.
Большой коэффициент усиления по напряжению: (40400)103.
Малый дрейф нуля.
Большое входное сопротивление (100кОм-3МОм).
Малое выходное сопротивление (десятки Ом).
Если допускаются большие габариты конденсаторов, то используют:
Бумажные металлизированные МБГП;
Бумажные полистироловые МПГП;
Бумажные фторопластовые МФГП.
Передаточная функция регулятора по каналу управления:

![]() .
.
47. Типовые регуляторы: пи-регулятор.
![]() ;
;
на
низких частотах преобладает интегрирующий
эффект (отсутствует статическая ошибка),а
на высоких частотах – эффект от
![]() (качество переходного процесса лучше,
чем при И-законе регулирования).
(качество переходного процесса лучше,
чем при И-законе регулирования).
![]() – закон регулирования.
– закон регулирования.
– отсутствие регулятора;
– П-регулятор;
– ПИ-регулятор.
Достоинства:
Простота реализации;
Существенно улучшает точность регулирования в статике:
• Установившаяся ошибка при постоянном входном воздействии равна нулю;
• Эта ошибка нечувствительна к изменениям параметров объекта.
Недостатки: повышается астатизм системы на единицу и, как следствие, снижение запасов устойчивости, увеличивается колебательность переходного процесса, увеличивается .
Реализация пи-регулятора
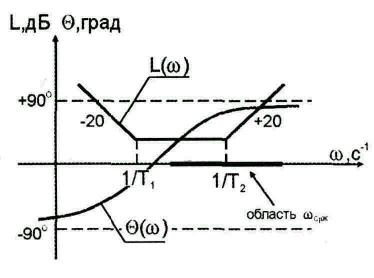
48. Типовые регуляторы: пид-регулятор.
На низких частотах преобладает интегрирующий эффект, а на высоких – дифференцирующий.
![]()
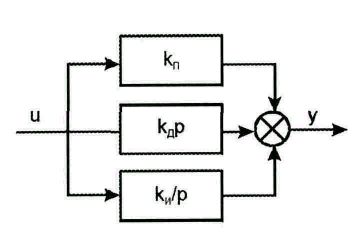 .
.
![]() – закон регулирования.
– закон регулирования.
Статическая система при установке ПИД-регулятора становится астатической (статическая ошибка равна нулю), однако в динамике астатизм снимается за счет действия дифференцирующей составляющей, т. е. качество переходного процесса улучшается.
 Достоинства:
Достоинства:
Высокая статическая точность;
Высокое быстродействие;
Большой запас устойчивости.
Недостатки:
Применимы для систем, описываемых
дифференциальными уравнениями невысокого
порядка, когда объект имеет один или два полюса,
или может быть аппроксимирован моделью второго
порядка.
Требования к качеству управления низкие.