

4.4 Спутниковые радионавигационные системы
Спутниковые радионавигационные системы (СРНС) – это комплекс технических средств, в котором используются ИЗС с известными параметрами движения для измерения координат объектов на поверхности Земли и околоземном пространстве радиотехническими методами.
Использование ИЗС в качестве радионавигационной опорной станции (радиомаяка), координаты которой хотя и изменяются, но заранее известны для любого момента времени, позволило создать ряд СРНС, отличающихся параметрами орбиты ИСЗ и методами определения координат объекта.
4.4.1. Срнс первого поколения
В СРНС первого поколения использовались и используются низковысотные ИЗС, а координаты объекта (приемника) определяются по сигналам одного ИСЗ, находящегося в зоне радиовидимости приемника.
Рассмотрим упрощённую модель определения координат объекта с помощью сигналов одного ИСЗ.
Пусть
ИСЗ вращается с известной постоянной
скоростью
![]() по окружности радиусом
по окружности радиусом
![]() в плоскости, проходящей через центр
Земли (О) (рисунок 4.8).
в плоскости, проходящей через центр
Земли (О) (рисунок 4.8).
а) Дифференциальный доплеровский метод определения координат
Сущность
метода заключается в том, что для
измерения расстояния между ИСЗ и П
момент времени
![]() и построения линии положения используется
зависимость доплеровского сдвига
частоты радиосигнала ИСЗ от времени
(рисунок 4.11).
и построения линии положения используется
зависимость доплеровского сдвига
частоты радиосигнала ИСЗ от времени
(рисунок 4.11).
Приемник
объекта имеет возможность сравнить
частоту принимаемого от ИСЗ колебания
![]() с частотой собственного (бортового
эталона), частота колебаний которого
совпадает с частотой излучения ИСЗ -
с частотой собственного (бортового
эталона), частота колебаний которого
совпадает с частотой излучения ИСЗ -
![]()

Рисунок 4.11 - Дифференциальный метод определения координат
Измерив
разность частот
![]() ,
можно построить зависимость
,
можно построить зависимость
![]() от
времени; причем момент
от
времени; причем момент
![]() ,
когда
,
когда
![]() соответствует
кратчайшему расстоянию между ИСЗ и П.
Зная координаты ИСЗ в момент
и направление его движения, можно
построить линию положения СП на
поверхности Земли (линия на поверхности
Земли, для которой
соответствует
кратчайшему расстоянию между ИСЗ и П.
Зная координаты ИСЗ в момент
и направление его движения, можно
построить линию положения СП на
поверхности Земли (линия на поверхности
Земли, для которой
![]() ).
).
Для определения местоположения П на линии положения измеряется наклонная дальность от П до ИСЗ, которая зависит от крутизны функции в точке .
![]() ,
(4.4)
,
(4.4)
где
![]() -
масштабирующий коэффициент.
-
масштабирующий коэффициент.
Используя
![]() ,
можно построить поверхность положения,
которая в данном случае является сферой
с центром в точке расположения ИСЗ;
точка пересечения этой сферы с линией
положения СП определяет местоположение
приемника (П).
,
можно построить поверхность положения,
которая в данном случае является сферой
с центром в точке расположения ИСЗ;
точка пересечения этой сферы с линией
положения СП определяет местоположение
приемника (П).
б) Интегральный доплеровский метод определения координат
Сущность метода заключается в том, что для определения расстояния между ИСЗ и П используется изменение во времени радиальной скорости ИСЗ, движущегося в зоне видимости приемника.
Интегральный метод имеет более высокую помехоустойчивость, так как использует длительное наблюдение сигнала. Известно, что доплеровский сдвиг частот связан с радиальной составляющей скорости движения ИСЗ относительно точки П
![]() .
(4.5)
.
(4.5)
Тогда
![]() ,
(4.6)
,
(4.6)
где
![]() – интервал наблюдения,
– интервал наблюдения,
![]() – радиальная
скорость,
– радиальная
скорость,
![]() и
и
![]() -
наклонная дальность П и ИСЗ в момент
времени
-
наклонная дальность П и ИСЗ в момент
времени
![]() и
и
![]() (рисунок 4.12).
(рисунок 4.12).

Рисунок 4.12 - Интегральный метод определения координат
Из (4.6) следует, что
 ;
;
аналогично
 . (4.7)
. (4.7)
Каждое
значение
![]() соответствует поверхности положения
в виде гиперболоида; его пересечение
с поверхностью Земли дает одну из линий
положения
соответствует поверхности положения
в виде гиперболоида; его пересечение
с поверхностью Земли дает одну из линий
положения
![]() .
Пересечение линий положения позволяет
определить координаты приемника.
Возможная при этом неоднозначность
(точка пересечения линий положения не
является единственной) устраняется,
как и в наземных РНС, с помощью
дополнительных данных о координатах
приемника.
.
Пересечение линий положения позволяет
определить координаты приемника.
Возможная при этом неоднозначность
(точка пересечения линий положения не
является единственной) устраняется,
как и в наземных РНС, с помощью
дополнительных данных о координатах
приемника.
Информация о параметрах орбиты ИСЗ и параметрах движения ИСЗ передается с помощью модуляции радиосигнала, излучаемого передатчиком спутника.
Примером использования интегрального доплеровского метода является низкоорбитальная СРНС «Транзит». В состав этой СРНС входят пять или шесть ИСЗ, наземный комплекс контроля и парк бортовой аппаратуры потребителей (приемники). ИСЗ имеют круговые полярные орбиты высотой около 1100 км с периодом обращения около 107 мин; каждый ИСЗ находится в зоне радиовидимости потребителя от 10 до 16 мин.
В этой системе применяются два высокочастотных сигнала: основной 400 МГц и вспомогательный 150 МГц, что дает возможность компенсации ошибки, обусловленной рефракцией сигналов при доплеровских измерениях. Информация о параметрах движения ИСЗ осуществляется с помощью двоичных сигналов и фазовой модуляции обеих несущих частот. СРНС «Транзит» позволяет определить местоположение неподвижного потребителя (П) с точностью до 50 м; средний интервал между измерениями колеблется от 35 мин. (в приполярной зоне) до 50 мин. (вблизи экватора); уменьшить этот интервал невозможно, так как все ИСЗ используют одни и те же частоты несущих колебаний.
Таким образом, недостатки низкоорбитальной СРНС сводятся, в основном, к следующему: малая точность определения координат, особенно движущихся потребителей; большой интервал времени между измерениями.
4.4.2. СРНС второго поколения
В СРНС второго поколения в настоящее время существуют две аналогичные СРНС – ГЛОНАСС (Россия) и GPS (США), которые призваны выполнять широкий спектр задач, таких как самолётовождение, судовождение, навигация наземных транспортных средств, навигационное обеспечение космических средств, использование спасательными службами, и, конечно, использование в военных целях. Кроме того, сейчас находится нетрадиционное применение навигационному оборудованию, например, поиск угнанных автомобилей, экспедирование и логистика грузов. Современные технологии позволяют совмещать приёмоиндикаторную аппаратуру с мобильными телефонами, что открывает новые горизонты для спутниковой навигации. Магеллан!
В общем случае, любая СРНС (GPS или ГЛОНАСС ) включает в себя следующие сегменты (подсистемы): космический сегмент, сегмент контроля и управления, пользовательский сегмент и дифференциальные структуры. Более подробно они и выполняемые ими функции будут рассмотрены далее. Структурная схема СРНС второго поколения показана на рисунке 4.13.
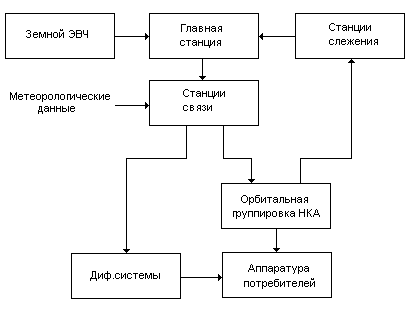
Рисунок 4.13 – Структурная схема СРНС
4.41 Спутниковая радионавигационная система GPS
Спутниковая радионавигационная система GPS (NAVSTAR) – Global Positioning System (Navigation System with Time and Ranging) – предназначена для высокоточного определения трёх координат (широта, долгота, высота), составляющих вектора скорости и времени различных подвижных объектов. Её разработка началась в 1973 году по заказу ВВС МО США (под чьим руководством система сейчас и находится), в 1978 году начался вывод спутников на орбиту, а в 1995 году была признана полностью готовой к эксплуатации (хотя ещё до этого активно использовалась на транспорте, в быту и военными). В создание системы было вложено около 20 млрд. долларов.
Система работает в двух режимах: PPS (Precise Positioning Service – высокая точность измерений) и SPS (Standard Positioning Service – стандартная точность измерений). Режим PPS используется, в основном, военными и обеспечивает точность до нескольких сантиметров, а режим SPS позволяет определить координаты объектов лишь с точностью до нескольких метров. Следует отметить, что раньше существовало искусственное загрубление сигналов, предназначенных для коммерческого использования (селективный доступ - SA). 1 мая 2000 года эта мера была снята, что практически в 5 раз увеличило точность определения координат.
Космический сегмент СРНС GPS образован орбитальной группировкой, состоящей из 24 основных навигационных космических аппаратов (НКА) и 3 резервных. НКА находятся на 6 круговых орбитах (по 4 спутника на каждой), равномерно разнесённых по долготе на 600 на высоте примерно 20180 км. Период их обращения составляет 12 часов, угол наклона орбиты относительно плоскости экватора – 550.
Схематически размещение НКА на орбитах может быть проиллюстрировано рисунок Б.2, где A,B,C,D,E,F – орбитальные плоскости.

Рисунок 4.14 – Орбитальное построение GPS
В
состав бортового оборудования
НКА GPS
входят следующие подсистемы: синтезатор
частот, блоки формирования и передачи
навигационных сигналов, средства
синхронизации и временного обеспечения
или бортовые «часы» (на НКА последнего
поколения используются два рубидиевых
(со стабильностью
![]() )
и два цезиевых стандарта частоты (со
стабильностью
)
и два цезиевых стандарта частоты (со
стабильностью
![]() ),
бортовое вычислительное устройство в
составе основной и двух резервных ЭВМ,
системы ориентации, телеметрии, приёма
команд и ретрансляции сигналов НКУ,
терморегулирования и электропитания.
Антенная система линии передачи данных
использует конические и спирально-конические
антенны. Для передачи навигационных
сигналов используются фазированные
антенные решётки из спиральных излучающих
элементов.
),
бортовое вычислительное устройство в
составе основной и двух резервных ЭВМ,
системы ориентации, телеметрии, приёма
команд и ретрансляции сигналов НКУ,
терморегулирования и электропитания.
Антенная система линии передачи данных
использует конические и спирально-конические
антенны. Для передачи навигационных
сигналов используются фазированные
антенные решётки из спиральных излучающих
элементов.
На НКА имеются двигатели для коррекции орбиты и двигатели системы ориентации. На бортах НКА так же размещаются средства межспутниковой связи, обмена данными и измерения взаимных дальностей. Эти средства предназначены для обеспечения автономной работы СРНС в течение 180 дней без существенного ухудшения точности определения координат.
Передатчики НКА GPS излучают два непрерывных сигнала на частотах L1 и L2. Несущая частота L1 состоит из двух компонентов, которые находятся по фазе в квадратуре друг к другу (сдвинуты на π/2) для удобства их разделения. Первая - модулируется двумя двоичными последовательностями (дальномерный псевдослучайный P-код и информационная последовательность линии передачи данных), складывающимися по модулю 2. Вторая – также модулируется двумя двоичными последовательностями (дальномерный псевдослучайный C/A-код и информационная последовательность), складывающимися по модулю 2. Обе информационные последовательности содержат информацию об эфемеридах НКА, системном времени, поведении “часов” НКА статусе сообщения и др.
Несущая частота L2 имеет один компонент и модулируется двумя двоичными последовательностями (как правило, дальномерный псевдослучайный P-код или C/A-код и информационная последовательность линии передачи данных), складывающимися по модулю 2. Здесь также предусмотрен режим использования только P(Y)-кода, когда информационная последовательность вообще не передаётся. Во всех случаях скорость передачи данных информационных последовательностей 50 бит/с. Используется фазовая манипуляция несущих частот (bi-phase shift key, BPSK).
Основным навигационным дальномерным псевдослучайным кодом является P-код. В распоряжении мирового сообщества находится открытый псевдослучайный код C/A (Clear (или Coarse)/Acquisition – “грубый захват”), который сначала использовался для первого вхождения в режим слежения с последующим переходом к использованию P-кода. С целью преднамеренного снижения точности определения координат до уровня 100 метров для сигнала с C/A-кодом предусмотрен специальный режим селективного доступа (Selective Availability, S/A). Предусмотрена возможность “исключать” сигналы GPS на региональной основе, если посчитают, что создаётся угроза их национальной безопасности.
Все НКА в системе GPS используют одни и те же частоты, но каждый свои коды, поскольку свойства рассмотренных кодов таковы, что они позволяют надёжно разделять сигналы различных НКА между собой. То есть здесь используется кодовый принцип разделения сигналов. В этом и состоит главное отличие системы GPS от системы ГЛОНАСС, где используется частотное разделение каналов (т.е. все спутники работают на разных частотах при едином дальномерном коде).
P-коды представляют собой двоичные псевдослучайные последовательности (ПСП) длиной в 7 суток, нарезаемые из ПСП длиной в 267 суток. ПСП передаются со скоростью 10,23 Мбит/с (тактовая частота 10,23 МГц). Закрытый P(Y)-код формируется в соответствии со специальными закрытыми документами.
C/A-код (код Голда) представляет собой ПСП длиной в 1 мс с тактовой частотой 1,023 МГц.
Таким образом, сигналы GPS занимают в L-диапазоне две полосы шириной по 20,46 МГц, в центре которых находятся частоты L1 и L2. Эти частоты когерентно порождаются одним генератором НКА, и на земле частота этого генератора должна иметь величину 10,23 МГц (тактовая частота P-кода). Учитывая появления релятивистского эффекта, величина частоты задающего генератора не орбите должна быть смещена на -4,5674*E-3 Гц и равна 10,22999999543 МГц. Номинальные значения частот будут 1575,42 МГц и 1227,6 МГц для диапазонов L1 и L2 соответственно.
При этом корреляционные потери мощности сигнала составляют: вследствие несовершенства модуляции 0,6 дБ; вследствие несовершенства предварительной фильтрации в полосе 20,46 МГц – 0,4 дБ.
Фазовые шумы несущей позволяют при односторонней полосе контура фазовой автоподстройки в 10 Гц реализовать точность слежения за фазой порядка 0,1 радиан (СКО).
Паразитные сигналы в полосе 20,46 МГц должны быть по крайней мере на 40 дБ ниже уровня немодулированных несущих в обоих диапазонах.
В результате фазовой манипуляции значения фаз и состояний кодов составного L1 сигнала будут определяться таблицей 4.2.
Таблица 4.2 - Состояние кодов и фазы составного L1 сигнала
Значения фазы, 0 |
P-код |
C/A-код |
0 |
0 |
0 |
-70,5 |
1 |
0 |
+109,5 |
0 |
1 |
180 |
1 |
1 |
Все передаваемые одним НКА сигналы порождены одним стандартом частоты и когерентно связаны между собой. Это относится и к несущей, и к используемым кодам, причём, для цифровых сигналов нормы задаёт P-код. В информационной последовательности различие в переходах между состояниями не превышает 10 нс.
В навигационном сообщении информационной последовательности GPS содержится информация об эфемеридах НКА, позволяющих рассчитать их координаты и составляющие скорости, альманах созвездия НКА, частотно-временные поправки, метки времени, параметры ионосферной модели, сведения о работоспособности бортовой аппаратуры НКА и др. Эта информация используется в аппаратуре потребителя при решении задачи по определению координат, скорости и временной поправки к местной шкале времени.
Информационная последовательность передаётся кадрами ёмкостью 1500 бит и длительностью 30 с. Один кадр делится на субкадры длительностью 6 с. Каждый субкадр (или строка) содержит 10 слов по 30 бит каждое. В одном кадре передаётся 1/25 всего альманаха. Поэтому передача всей информации альманаха занимает 12,5 мин. Этот массив информации объёмом 37500 бит называют суперкадром.
Используется 11 типов блоков (форматов) данных (таблица 4.3).
Таблица 4.3 - Содержание блоков (форматов) данных
Номер блока (формата) |
Содержание |
Номер субкадра в кадре |
Номер страницы в суперкадре |
1 |
Временные поправки, поправки для двухчастотной ионосферной погрешности |
1 |
- |
2 |
Эфемериды |
2 |
- |
3 |
Эфемериды |
3 |
- |
4 |
Альманах |
5 |
1-24 |
5 |
Признаки работоспособности НКА |
5 |
25 |
6 |
Резервное сообщение |
4 |
1,6,11,16,21 |
7 |
Резервное сообщение |
4 |
12,19,20,22,23,24 |
8 |
Параметры ионосферной модели |
4 |
18 |
9 |
Признаки A/S и работоспособности НКА |
4 |
25 |
10 |
Служебное сообщение |
4 |
13 |
11 |
Резервное сообщение |
4 |
14,15,17 |
Информация блоков 1,2,3 передаётся оперативно через 30с. Информация остальных блоков передаётся страницами в составе суперкадра на месте, указанном в 4-м столбце таблицы 4.3.
Сегмент управления GPS состоит из сети наземных станций слежения, расположенных по всему миру. Сеть включает в себя главную (ведущую) станцию (ГС), контрольные станции (КС) или станции слежения (СС) и три земные станции ввода данных в НКА. Главная станция контроля и управления находится на авиабазе Фалкон, штат Колорадо, США. Контрольные станции расположены сравнительно равномерно по всему земному шару вблизи экватора, что создаёт благоприятные условия для наблюдений НКА. Эти станции принимают сигналы спутников GPS и осуществляют специальные прецизионные измерения дальности до НКА. Главная станция осуществляет сбор измерений от всех КС. Затем все измерения обрабатываются. По ним осуществляются точные расчёты параметров орбит, ионосферной модели и корректирующих поправок для бортовых часов, которые с главной станции через земные станции связи совместно с данными обработки метеорологической информации, позволяющей уточнить параметры модели тропосферы, передаются на борт каждого НКА. Производится так же мониторинг состояний НКА и управление их работой.
Сегмент управления устанавливает шкалу времени GPS, которая привязана к шкале времени UTC (шкала Универсального координированного времени), поддерживаемой Военно-морской обсерваторией США. Самой крупной единицей времени в GPS является неделя. Время GPS может отличаться от UTC, поскольку первое является непрерывным, а второе может корректироваться на целое число секунд. Между ними имеется также некоторое постоянно растущее расхождение. Поэтому ГС контролирует шкалу времени GPS с тем, чтобы она не уходила от UTC больше, чем на 1 мкс.
Передаваемые с НКА навигационные данные содержат информацию о расхождениях шкал времени. Точность этих данных такова, что погрешность алгоритмической привязки шкалы времени GPS к UTC находится в пределах 90 нс (СКО).
Время GPS определяется так называемым Z-отсчётом, который представляет собой 29-разрядное двоичное число. Старшие 10 разрядов характеризуют число недель, тогда как оставшиеся 19 разрядов характеризуют число 1,5-секундных циклов X1-кода, порождающего P-код. Z-отсчёт привязан к началу цикла X1-кода и передаётся в составе навигационного сообщения C/A сигнала НКА. Он характеризует время начала излучения сигнала и может использоваться для сокращения времени поиска сигнала с P-кодом.
4.42 Спутниковая радионавигационная система ГЛОНАСС
Разработка системы ГЛОНАСС (Глобальная Навигационная Спутниковая Система) в СССР была начата в 1982 году. В октябре 1982 год был запущен первый её спутник «КОСМОС 1413». В 1995 году было завершено развёртывание СРНС ГЛОНАСС до её штатного состава в 24 космических аппарата (КА).
Система ГЛОНАСС, как и система GPS, позволяет практически в любом месте земли (за исключением приполярных областей) определить пространственно-временные координаты (ПВК) потребителей. Эту операцию осуществляют в соответствии с концепцией независимой навигации, предусматривающей вычисление искомых навигационных параметров непосредственно в аппаратуре потребителей. В рамках этой концепции в СРНС ГЛОНАСС выбран позиционный способ определения местоположения потребителей на основе беззапросных (позиционных) дальномерных измерений по сигналам нескольких навигационных ИСЗ с известными координатами
ГЛОНАСС, как и любая другая СРНС, состоит из четырёх основных функциональных частей (сегментов), рисунок 4.11.
- космический сегмент, в который входит орбитальная группировка навигационных космических аппаратов (НКА);
- сегмент управления – наземный комплекс управления (НКУ) орбитальной группировкой космических аппаратов;
- аппаратура пользователей системы (потребителей);
- дифференциальные структуры.
Спутники ГЛОНАСС (космический сегмент), находящиеся на высоте 19130км. над поверхностью Земли, излучают шумоподобные непрерывные навигационные радиосигналы в двух диапазонах частот: L1 (~1250 МГц) и L2(~1600 МГц) – навигационные измерения в двух диапазонах частот позволяют исключить ионосферные погрешности навигационных измерений. Они (спутники) размещаются на 3 круговых орбитах (по 8 спутников на каждой) с наклонением i=64,80 и разнесеных по аргументу широты номинально на 450 . Аргументы широты восьми НКА в трёх орбитальных плоскостях сдвинуты на (±150). Долготы восходящих узлов трёх орбитальных плоскостей различаются номинально на 1200. Номинальный период обращения НКА равен 11часов 16 минут.
Орбитальное построение ГЛОНАСС схематично проиллюстрировано на рисунке 4.15.

Рисунок 4.15 - Орбитальное построение ГЛОНАСС
В состав аппаратуры НКА входят:
- радиотехническое оборудование (передатчики навигационных сигналов и телеметрической информации, приёмники данных и команд от НКУ, антенны, блоки ориентации, стабилизации, коррекции, электропитания);
- бортовая ЭВМ (управляющий комплекс);
- бортовой эталон времени и частоты – цезиевый стандарт частоты с относительной нестабильностью порядка 10-13 – позволяет обеспечить практически синхронное излучение навигационных сигналов всеми спутниками, что необходимо для реализации режима пассивных дальномерных измерений в аппаратуре потребителей;
- средства обеспечения параметров среды в гермоконтейнере.
Аппаратура НКА предназначена для выполнения следующих основных функций:
- излучения высокостабильных навигационных сигналов стандартной и высокой точности (СТ и ВТ соответственно) в ДМ-диапазоне волн;
- приема, хранения, формирования и передачи навигационной информации;
- формирования, оцифровки и хранения сигналов времени;
- ретрансляции или излучения сигналов для радиоконтроля орбиты спутника и определения поправок к бортовой шкале времени;
- приема, дешифровки и обработки разовых команд;
- приёма и отработки программ управления режимами функционирования спутника на орбите;
- приёма и обработки кодов коррекции и фазирования бортовой шкалы;
- выработки и передачи сигналов «Вызов НКУ» при сбое или выходе важных контролируемых параметров за пределы нормы;
- анализа и контроля состояния бортовой аппаратуры и выработки управляющих команд;
Время активного существования на орбите НКА составляет 3-5 лет, а в последующих поколениях НКА составит 10 лет и более.
Каждый спутник системы ГЛОНАСС излучает фазоманипулированные навигационные радиосигналы (НРС) в диапазоне L1 и L2. Основное отличие сигналов в системе ГЛОНАСС от сигналов системы GPS заключается в значении рабочей частоты, законе формирования и параметрах модулирующих двоичных последовательностей. В системе ГЛОНАСС используется частотное разделение (FDMA) сигналов различных НКА в каждом из диапазонов при едином дальномерном коде. В отличие от этого в системе GPS сигналы спутников, излучаемые на одной частоте, различаются по дальномерному коду (CDMA). Спутники ГЛОНАСС, находящиеся в противоположных точках орбиты (антимодальные НКА), т.е. не видимые потребителям одновременно, передают навигационные радиосигналы на одинаковых частотах, что позволяет рационально использовать частотный диапазон. Из таблицы 4.4 видно, что такие спутники имеют системные номера, отличающиеся на четыре, и находятся в одной орбитальной плоскости.
В радиолинии частотного диапазона L1 спутники излучают шумоподобные фазоманипулированные НРС двух типов: стандартной и высокой точности (СТ и ВТ соответственно), которые позволяют выделить два соответствующих канала навигационного обслуживания – каналы стандартной и высокой точности.
Сигнал СТ предназначен для использования гражданскими потребителями. Сигнал ВТ модулирован специальным кодом и не рекомендован к использованию без согласования с МО РФ, поэтому рассматриваемые каналы можно называть открытый и закрытый.
Таблица 4.4 - Нумерация используемых спутниками каналов
-
Номер орбитальной плоскости/точки спутника
Номер частотного канала
1 / 8
2
3 / 21
24
1 / 7
21
1 / 2
5
3 / 18
10
3 / 17
24
3 / 23
3
2 / 12
22
2 / 14
9
2 / 16
22
1 / 4
12
1 / 3
21
1 / 6
13
3 / 20
1
3 / 22
10
3 / 19
3
2 / 15
4
2 / 10
9
2 / 11
4
2 / 9
6
2 / 9
11
2 / 13
6
В отличие от сигнала СТ системы GPS, в системе ГЛОНАСС не предусматривается его принудительное загрубление, хотя иногда и используется применительно к нему обозначение ПТ-сигнал (сигнал пониженной точности). Однако имеющиеся более низкие, по сравнению с ВТ-сигналом, характеристики точности можно отнести к этапу выбора параметров сигнала при разработке системы, и не связаны с политикой поставщиков навигационного обслуживания в системе ГЛОНАСС на этапе её эксплуатации. В связи с этим, всем пользователям ГЛОНАСС доступны измерения координат местоположения и скорости с беспрецедентно высокой точностью. Далее более подробно рассматривается структура и характеристики СТ-сигнала передаваемого в диапазоне L1.
В радиолинии диапазона L2 в настоящее время передаётся только ВТ-сигнал, поэтому гражданские потребители не могут использовать метод двухчастотной компенсации ионосферных погрешностей. Этот существенный, с точки зрения гражданских потребителей, недостаток присущ и системе GPS. Но в будущем предполагается обеспечить передачу открытого сигнала СТ и на частоте L2.
В ГЛОНАСС реализована следующая “сетка” номинальных значений несущих частот для НРС в двух диапазонах – L1 и L2 (индексы 1 и 2 соответственно):
f1,k= f1,0+k* Δf1; f1,0=1602 МГц; Δf1=0,5625 МГц;
f2,k= f2,0+k* Δf2; f2,0=1246 МГц; Δf2=0,4375 МГц;
f1,k/ f2,k=9/7,
где k=(0÷24) – номер частотного канала.
Канал k=0 не предназначен для использования потребителями ГЛОНАСС. Он применяется наземной подсистемой управления для проверки резервных спутников на орбите при восполнении орбитальной группировки. Сведения о распределении частотных каналов с 1 по 24 между спутниками, расположенными в орбитальных рабочих точках с номерами m=(1÷24) содержатся в альманахе системы. В таблице 4.5 показано соответствие номинальных значений несущих частот для двух диапазонов каналам k=(0÷24).
Таблица 4.5 - План частот
Номер канала |
Частота, МГц |
Номер канала |
Частота, МГц |
||
L1 |
L2 |
L1 |
L2 |
||
00 |
1602 |
1246 |
13 |
1609,3125 |
1251,6875 |
01 |
1602,5625 |
1246,4375 |
14 |
1609,875 |
1252,125 |
02 |
1603,125 |
1246,875 |
15 |
1610,4375 |
1252,5625 |
03 |
1603,6875 |
1247,3125 |
16 |
1611 |
1253 |
04 |
1604,25 |
1247,75 |
17 |
1611,5625 |
1253,4375 |
05 |
1604,8125 |
1548,1875 |
18 |
1612,125 |
1253,875 |
06 |
1605,375 |
1248,625 |
19 |
1612,6875 |
1254,3125 |
07 |
1605,9375 |
1249,0625 |
20 |
1613,25 |
1254,75 |
08 |
1606,5 |
1249,5 |
21 |
1613,8125 |
1255,1875 |
09 |
1607,0625 |
1249,9375 |
22 |
1614,375 |
1255,625 |
10 |
1607,625 |
1259,375 |
23 |
1614,9375 |
1256,0625 |
11 |
1608,1875 |
1250,8125 |
24 |
1615,5 |
1256,5 |
12 |
1608,75 |
1251,25 |
|
|
|
Навигационные СТ-сигналы с тактовой частотой 511 кГц занимают в частотном диапазоне L1 полосу шириной (1602,5625…1615,5)±0,511МГц.
Внеполосные излучения каждым НКА за пределами полосы, отведённой для НРС ГЛОНАСС, не превышают -40дБ относительно мощности P немодулированной несущей. Навигационные ВТ-сигналы с тактовой частотой 5,11 МГц занимают в частотном поддиапазоне сигналов L1 полосу шириной (1602,5625…1615,5)±5,11МГц.
В системе ГЛОНАСС используются сложные фазоманипулированные сигналы. Две составляющие сигнала на частоте L1 манипулируются по фазе на ±1800. Для модуляции каждой составляющей используется своя модулирующая двоичная последовательность (код).
Для получения высокой точности измерений задержки сигнала излучаемый сигнал модулируется дальномерным кодом стандартной точности (СТ-код), представляющим периодическую последовательность максимальной длины. Для диапазона L1 тактовая частота формирования дальномерного кода fст=511 кГц, период повторения Tп.к=1 мс.
Для передачи навигационной (служебной) информации используется модуляция двоичной последовательностью (кодом служебной информации (СИ-код)) с тактовой частотой fси=50 Гц.
Для обеспечения безошибочной работы фазового демодулятора в приёмнике сигналов СРНС передаваемый сигнал подвергается относительной фазовой манипуляции (ОФМ), а для обеспечения процессов синхронизации в приёмнике вводятся:
- модуляция меандровым колебанием (М-кодом) с fмк=100 Гц (тактовая синхронизация);
- код метки времени (МВ-код), представляющий собой двоичную псевдослучайную последовательность (ПСП МВ) с тактовой частотой fмв=100 Гц.
Упрощенная схема формирования модулирующей последовательности в ГЛОНАСС показана на рисунке 4.16, где ФОК – формирователь относительного кода.

Рисунок 4.16 – Схема формирования модулирующей последовательности
Как видно из рисунка, модулирующий навигационный сигнал (двоичная последовательность) формируется в два этапа. На первом этапе происходит сложение по mod 2 трёх двоичных сигналов: дальномерного кода стандартной точности (СТ-код), кода служебной информации (СИ-кода) и меандрового колебания (М-кода).
Результирующая двоичная последовательность поступает на модуляцию несущего колебания в течение 1,7 с каждого двухсекундного интервала спутникового времени.
В течение оставшихся 0,3 с этого интервала модулирующая последовательность формируется сложением по mod 2 двух последовательностей: дальномерного СТ-кода и кода метки времени (МВ-кода).
Фазовая манипуляция несущей осуществляется на π радиан с максимальной погрешностью не более ±0,2 рад.
Указанные результирующие двоичные последовательности используются для манипуляции одной из квадратурных составляющих сигнала спутника на верхней частоте. Другая квадратурная составляющая сигнала манипулируется двоичной последовательностью, образованной из специального высокоточного дальномерного кода (закон его формирования известен только потребителям, имеющим санкцию МО РФ) и соответствующей последовательности навигационных данных.
Дальномерный СТ-код представляет собой сравнительно короткую псевдослучайную последовательность (длиной 511 элементов). Эта ПСП обеспечивает по аналогии с С/А-кодом в системе GPS быстрый поиск дальномерного сигнала и приемлемую точность измерения дальности до НКА с соответствующей неоднозначностью. Порождающий полином СТ-кода Вст(x)=1+x5+x9 .
Код служебной (навигационной) информации (СИ-код) представляет собой преобразованную цифровую последовательность навигационных данных, передаваемых аппаратурой НКА потребителям системы ГЛОНАСС. Из рисунка 1.4 видно, что навигационные данные ai подвергаются помехоустойчивому кодированию в соответствии с кодом Хемминга (85,77) (кодовое расстояние равно четырём). Выходные символы bi преобразуются в относительный код по правилу
Ci=(bi+Ci-1)mod2, где Ci – последовательность символов в относительном коде (длительность рассматриваемых символов Тси=20 мс). Таким образом, в канале передачи навигационной информации используется ОФМ-сигнал, что исключает явление обратной работы.
Результирующая двоичная последовательность навигационного сообщения (D1-код), содержащая информационные и проверочные символы в так называемом бидвоичном коде (TD1=10 мс), образуется после сложения по mod 2 последовательности символов Ci в относительном коде (СИ-код) с меандровым колебанием (М-код с длительностью символа Тмк=10 мс). Бидвоичный код обеспечивает, в частности, простоту синхронизации по СИ-коду, содержащему серии одинаковых двоичных символов (нулей и единиц). Сигналы тактовых частот СТ-, МВ-, СИ-, М-кодов, и другие синхросигналы получают делением эталонной частоты БЭВЧ fо.г.=5 МГц, что теоретически обеспечивает когерентность формируемых последовательностей.
Код метки времени (ПСП МВ, МВ-код) представляет собой укороченную псевдослучайную последовательность с порождающим полиномом вида Вмв(x)=1+x3+x5.
Длина ПСП МВ равна тридцати символам с длительностью Тмв=10 мс каждый. Эта характерная двоичная последовательность имеет вид:
111110001101110101000010010110 – она используется как двухсекундная метка времени.
В излучаемом НРС границы двухсекундных строк, символов цифровой информации, символов меандра, символов ПСП МВ и символов ПСПД синхронизированы между собой.
Навигационные сообщения (НС), передаваемые каждым НКА ГЛОНАСС, содержат оперативную и неоперативную навигационную информацию. Потребителям они необходимы для планирования и осуществления навигационных определений.
Оперативная информация относится к НКА, излучающему НРС, и содержит: оцифровку меток времени спутника; оценку сдвига бортовой шкалы времени (БШВ) относительно системной шкалы (СШВ) и относительного отличия несущей частоты излучаемого радиосигнала от номинального значения; эфемеридную информацию – координаты и производные координат НКА в прямоугольной геоцентричной системе координат в определённый момент времени.
Неоперативная информация – содержит альманах системы: данные о состоянии всех НКА (альманах состояния), оценки сдвига БШВ каждого НКА относительно СШВ (альманах фаз), грубые параметры орбит сети НКА (альманах орбит), сдвиг шкалы времени (ШВ) относительно UT (мировое время). Альманах системы необходим для планирования сеанса навигации (выбор созвездия НКА) и для приёма НРС в системе (прогноз доплеровского сдвига несущей частоты).
Поток навигационной информации (НИ) состоит из непрерывно повторяющихся суперкадров, кадров и строк.
Структура передаваемой НИ в СРНС ГЛОНАСС оптимизирована таким образом, что объём суперкадра 7500 бит, из них 620 – резервные. ( в GPS 37500 и 2750 бит, соответственно). Каждый суперкадр состоит из кадров, в нём передаётся полный объём неоперативной информации альманаха для всех 24 НКА. Кадр, в свою очередь, состоит из 15 строк и содержит полный объём оперативной информации для конкретного НКА. Кадр имеет резерв, предусмотренный на случай изменений и дополнений в структуре навигационного сообщения.
Строка длительностью 2 с (100 бит) разделена на две части. В первой части (1,7 с) содержится НИ (85 бит) – бидвоичный относительный код, Во второй части строки (0,3 с) в качестве последовательности навигационных данных используется ПСП МВ (МВ-код), состоящая из 30 символов, длительностью 10 мс.
В каждой строке старшие 77 разрядов содержат информационные символы (85-ый символ обеспечивает реализацию относительного кода и равен “0”), а младшие 8 разрядов – проверочные символы. Они способствуют исправлению одиночных ошибок и обнаружению двойных ошибок (и большего чётного числа) в строке.
Следует отметить, что НРС в системе ГЛОНАСС обеспечивают более оперативный приём (обновление) альманаха за счёт более короткой длительность суперкадра по сравнению с системой GPS.
Наземный комплекс управления (НКУ) орбитальной группировкой космических аппаратов системы ГЛОНАСС содержит следующие взаимосвязанные стационарные элементы:
- центр управления системой (ЦУС);
- системный (наземный) эталон времени и частоты СЭВЧ –обеспечивает синхронизацию системы с помощью высокостабильного атомного (водородного) эталона времени и частоты (с относительной нестабильностью частоты 10-17);
- командная станция слежения (КСС);
- контрольные станции (КС);
- система контроля фаз (СКФ);
- квантово-оптические станции (КОС);
- аппаратура контроля поля;
НКУ выполняет основные функции:
- проведение траекторных измерений для определения, прогнозирования и уточнения параметров орбит всех спутников;
- временные измерения и синхронизация бортовых шкал времени БШВ каждого НКА с временной шкалой ЦС;
- формирование массивов служебной информации и их закладка в память бортовых ЭВМ;
- контроль по телеметрическим каналам за работой НКА;
- контроль характеристик навигационного поля;
- управление полётами спутников;
- определение сдвига фазы дальномерного навигационного сигнала НКА.
4.4.3 Принципы функционирования систем GPS и ГЛОНАСС
Основные принципы функционирования и навигационных определений в системе GPS и ГЛОНАС показаны на рисунке 4.15. Координаты потребителя в системе получаются посредством их расчёта по псевдодальностям (ПД) до НКА и псевдоскоростям (ПС).
Псевдодальности рассчитываются по временным задержкам прохождения сигналов синхронизированных между собой НКА по трассам “НКА - потребитель”. Задержки измеряются в результате сопоставления принятых псевдослучайных кодов и генерируемых в приёмнике копий этих кодов с учётом априори известных моментов излучений сигналов НКА. При этом могут использоваться так же соответствующие измерения разностей фаз несущих частот. Предварительно производится коррекция ПД за счёт компенсации тропосферных и ионосферных погрешностей.
Затем путём сложных математических вычислений в аппаратуре потребителей определяются текущие координаты спутников (X,Y,Z) и по измерениям приращений несущей частоты сигналов НКА определяются составляющие скорости (X’,Y’,Z’). Далее в аппаратуре потребителей вычисляются собственные координаты и составляющие скорости в геодезической системе координат (B,L,H,VB,VL,VH) и поправка к местной шкале времени.
Приёмоиндикаторы СРНС, состоящие из радиоприёмника и вычислителя, предназначены для приёма и обработки навигационных сигналов спутников с целью определения необходимой потребителям информации (пространственно-временных координат, направления и скорости, пространственной ориентации и т.п.).
Пространственное положение потребителя обычно определяется в приёмоиндикаторе в два этапа: сначала определяются текущие координаты спутников и первичные навигационные параметры (дальность, её производные и др.) относительно соответствующих спутников, а затем рассчитываются вторичные – географическая широта, долгота, высота потребителя и т.д. ( рисунок 4.17).

Рисунок 4.17 - Принципы навигационных определений
Сравнение текущих координат потребителей с координатами выбранных навигационных точек (точек маршрута) позволяет сформировать в приёмнике сигналы для управления различными транспортными средствами. Вектор скорости потребителя вычисляют путём обработки результатов измерений доплеровских сдвигов частоты сигналов НКА с учётом известного вектора скорости спутника. Для нахождения пространственной ориентации потребителя в приёмоиндикаторе СРНС осуществляются разностные измерения с использованием специальных антенных решёток.
Системы GPS и ГЛОНАСС призваны решать одинаковые задачи. Но, как уже было указано, они имеют несколько различную реализацию. В связи с этим у каждой из них имеются свои преимущества по сравнению с другой и свои недостатки.
Погрешности систем ГЛОНАСС и GPS и их точностные характеристики показаны в таблицах 4.6 и 4.7 соответственно.
Исходя из наличия положительных и отрицательных сторон у каждой СРНС, логичным становится вопрос о совместном использовании сигналов GPS и ГЛОНАСС.
Комбинированное использование систем GPS и ГЛОНАСС оказывается более эффективным, нежели автономная работа с одной из них. Во-первых, за счёт фактического увеличения суммарного количества спутников расширяется зона перекрытия навигационным сигналом; во-вторых, так как GPS и ГЛОНАСС работают в разных частотных диапазонах, совместный приёмник будет более устойчив к вероятному узкополосному глушению навигационного сигнала.
Таблица 4.6 - Погрешности СРНС
Источник погрешности |
Дальномерная погрешность, м |
||
ГЛОНАСС |
GPS |
||
СТ-код |
P-код |
C/A-код |
|
Эфемериды и БЭВЧ |
9,2 |
3,6 |
3,6 |
Ионосферная рефракция |
10 |
0,01 |
7 |
Тропосферная рефракция |
2 |
0,7 |
0,7 |
Многолучёвость |
1 |
1,8 |
1,2 |
Другие |
1 |
- |
- |
Приёмоиндикатор |
5 |
0 |
24 |
Типовое загрубление (SA-селективный доступ) |
- |
0,6 |
1,5 |
Суммарная СКО эфемерид |
14,7 |
4,1 (1,4…6,6) |
8,1 (7…14) – без SA 25 (30…40) – с SA |
Однако из-за различия в технической реализации приёма и обработки сигналов GPS и ГЛОНАСС на приёмник требуется устанавливать аппаратуру формирования и алгоритмы фазовых измерений для обеих систем, что влечёт увеличение его физических размеров и стоимости. Вес серийных образцов достигает 2-4 кг, а цена на порядок увеличивается. В результате анализа технических и стоимостных факторов, следует, что комбинированные приёмники при современном уровне технологии имеют слабые шансы проникновения на рынок массовой персональной навигационной аппаратуры. Однако сектор стационарных и бортовой приёмников для них доступен и перспективен.
Таблица 4.7 - Точностные характеристики СРНС
Параметр |
Точность измерений |
|
GPS (P=0,95) |
ГЛОНАСС (P=0,997) |
|
Горизонтальная плоскость, м |
72 (C/A-код) 18 (P-код) |
39 (СТ-код) |
Вертикальная плоскость, м |
135 (C/A-код) 28 (P-код) |
67,5 (СТ-код) |
Скорость, см/с |
<200 (C/A-код) 20 (P-код) |
15 (СТ-код) |
Ускорение, мм/с2 |
<19 (C/A-код) 8 (P-код) |
- |
Время, мкс |
0,34 (C/A-код) 0,18 (P-код) |
1 (СТ-код) |
Потребителями СРНС второго поколения являются наземные объекты (подвижные и неподвижные), летательные аппараты и др. номенклатура модификаций бортовой аппаратуры потребителей весьма обширна и зависит от потребителя.
Упрощённая структурная схема приемника показана на рисунке 4.18.
Антенное устройство в составе собственно антенны, ВЧ усилителя и блока управления ДНА обеспечивает прием, предварительное усиление и фильтрацию сигнала. В простейшем случае ДНА близка к полусфере. Приемное устройство супергетеродинного типа содержит усилители промежуточной частоты (УПЧ), блок поиска и автоматического слежения по частоте, фазе, времени, синтезатор частот на основе высокостабильного опорного генератора.
По завершении переходных процессов в следящих системах производится измерение радионавигационного параметра и декодируется информационное сообщение о параметрах движения ИСЗ; эти операции выполняются блоком измерения совместно с ЭВМ, содержащую от 1 до 4–х микропроцессоров.

Рисунок 4.18 - Структурная схема приемника
На пульт управления и индикации по команде оператора могут быть выведены данные об измеряемых координатах, составляющих скорости движения и результаты решения сервисных задач о параметрах движения потребителя. Погрешность определения координат зависит качества приемника (класса): приемники более высокого класса используют большее количество информации о движении ИСЗ системы для определения навигационного параметра. Погрешность измерения дальности для неподвижного приемника первого и второго класса не превышает 5 м., третьего – до 30 м. Приемники первого класса обеспечивают высокую скорость измерений, что позволяет применять их на высокоскоростных потребителях для точных измерений местоположения и скорости.
Навигационное оборудование, используемое в настоящее время для судовождения, управления движением и ориентацией в пространстве самолетов и космических объектов, включает в себя радиотехнические комплексы, состоящие из РЛС различного назначения, РНС ближней и дальней навигации, спутниковых систем управления и навигации и др. оборудования вспомогательного назначения.