

25. Микропроцессорные аппараты. Бездуговой пускатель с микропроцессорным управлением. Эл. Схема и её принцип действия.
Процессор – это программно управляемое устройство обработки информации, передаваемой в двоичном коде.
Микропроцессор (МП) – это выполненный по интегральной технологии в 1 или… БИС.
В настоящее время созданы МП, которые снабжены внутренней памятью для хранения небольших программ и встроенными устройствами ввода-вывода информации, подаваемыми входным и выходным портами портами, также МП получили название МП контроллерами (МК). МК идеально подходит для недорогих МП устройств (МПУ), управляющих какими-либо устройствами, оборудованием.
ЭА, выполненные с МП – будущее
Бездуговой
пускатель с МПУ (ПБМ). Существующая и
рассмотренная ранее защита АД от пусковых
токов и токов перегрузки не всегда
эффективна, т.к. она приводит к отключению
двигателя, рабочего механизма. Можно
избежать выключения двигателя путем
изменения режима работы (![]() ).
Такую защиту может выполнить ПБМ.
).
Такую защиту может выполнить ПБМ.
Пускатель
обеспечивает «мягкий» пуск двигателя,
т.е. пуск с ограничением пускового тока
путем
,
при этом
![]() ,
но он не должен стать меньше
,
но он не должен стать меньше
![]() ,
иначе двигатель не запустится (
,
иначе двигатель не запустится (![]() ).
).
ПБМ
осуществляет пуск двигателя по U,
т.е. плавно повышает
![]() ,
т.о. чтобы
,
т.о. чтобы
пусковой
ток не превышал допустимый ток. По мере
разгона двигателя противо ЭДС обмотки
статора ↑ и
![]() при достижении двигателем
при достижении двигателем
![]() .
Когда противо ЭДС достигает максимального
значения,
становится равным
.
Когда противо ЭДС достигает максимального
значения,
становится равным
![]() .
Регулирование
легко осуществить тиристорами Суммарная
∟α VS.
.
Регулирование
легко осуществить тиристорами Суммарная
∟α VS.
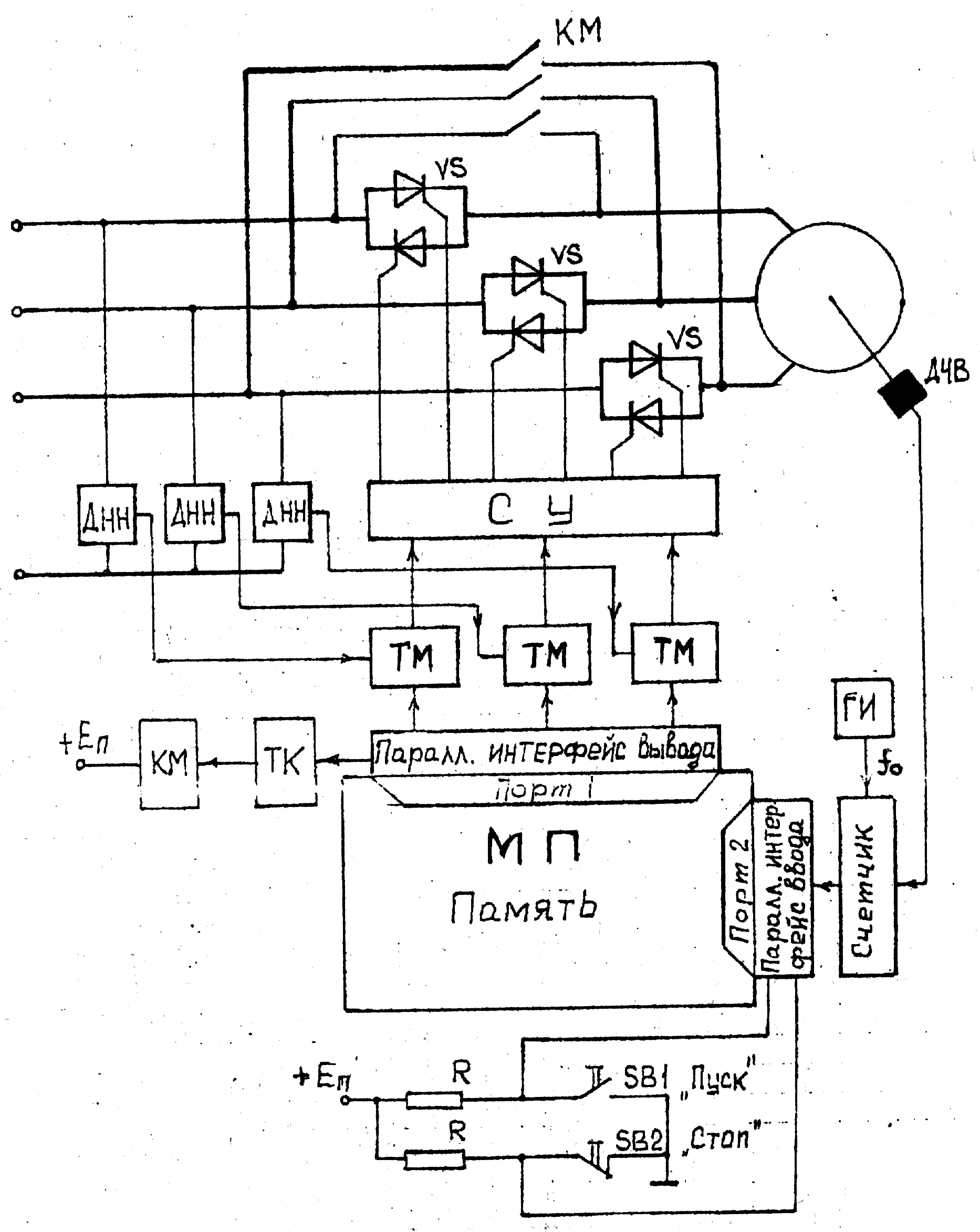
Структурная схема ПБМ на рис.6.18.
VS – силовые тиристоры, МП – микропроцессор с памятью, ДНН – датчик нуля напряжения, который фиксирует момент прохождения напряжения через 0. Этот момент является началом отсчета ∟α управления VS.
Возможная схема ДНН:
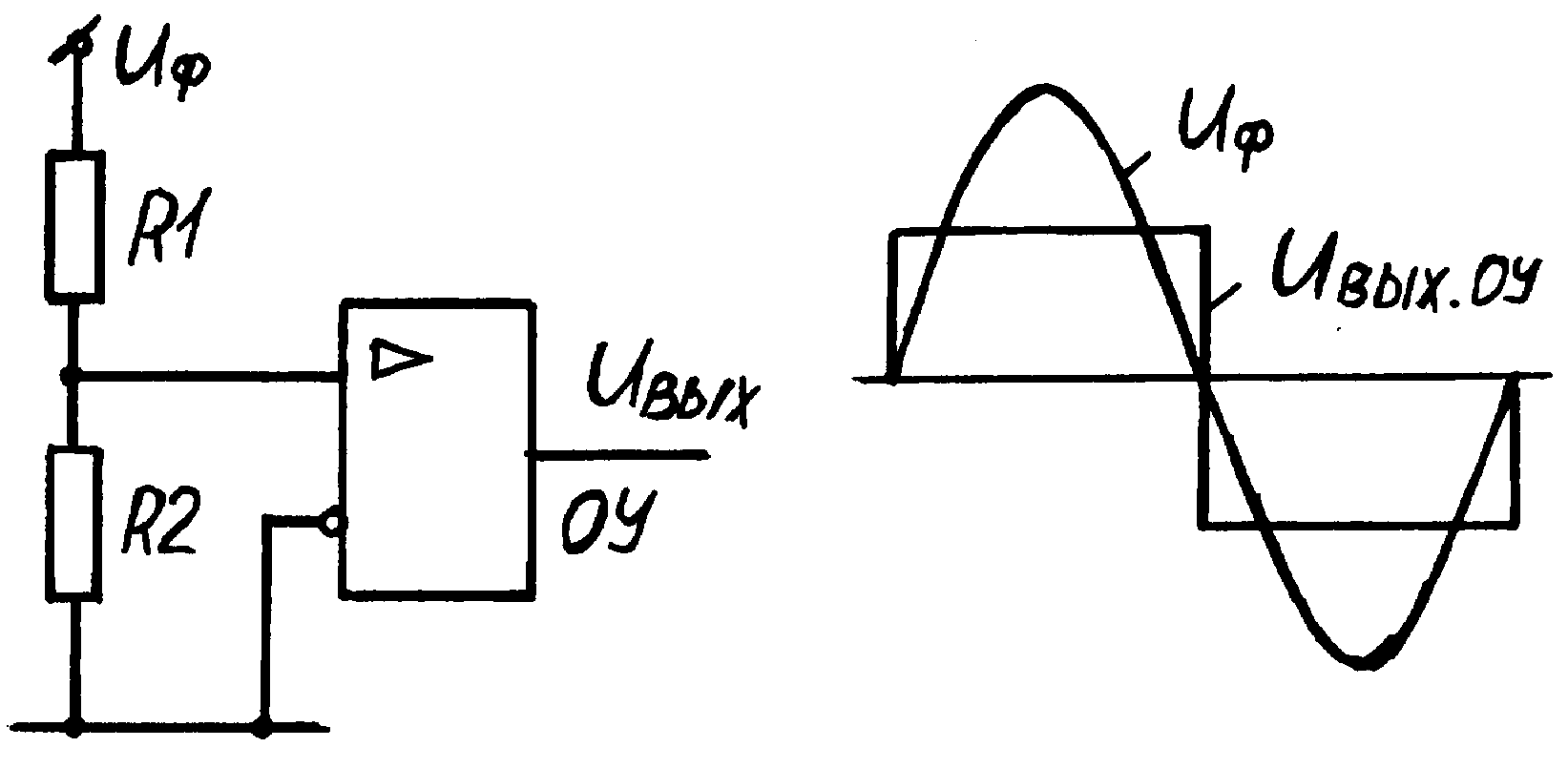
Выходной сигнал с ДНН подается на таймер ТМ. ТМ представляет собой счетчик импульсов внутреннего генератора стабильной частоты. От обычного счётчика отличается наличием регулируемой предустановки, т.е. определённого числа импульсов, при достижении которого счётчик останавливается и выдаёт выходной сигнал.
В рассмотренной схеме вых. сигнал таймеров,
следовательно на вход управления VS
– СУ. СУ формирует управляющие импульсы
для включения соответствующих VS,
после выдачи вых. сигнала ТН обнуляется
и ждёт появления следующего запускающего
импульса с ДНН. Предустановки ТН можно
изменять, при этом будет менятся и угол
рассмотренной схеме вых. сигнал таймеров,
следовательно на вход управления VS
– СУ. СУ формирует управляющие импульсы
для включения соответствующих VS,
после выдачи вых. сигнала ТН обнуляется
и ждёт появления следующего запускающего
импульса с ДНН. Предустановки ТН можно
изменять, при этом будет менятся и угол
![]() VS.
Для этого ТН подключается к МП через
параллельный интерфейс вывода. МП должен
менять предустановки ТМ в соответствии
с выбранным законом изменяется U
на двигателе этот закон может быть задан
как некоторая функция времени.
VS.
Для этого ТН подключается к МП через
параллельный интерфейс вывода. МП должен
менять предустановки ТМ в соответствии
с выбранным законом изменяется U
на двигателе этот закон может быть задан
как некоторая функция времени.
В
этом случае
![]() будет менятся по жесткому закону в
независимости от того как будет
происходить реальный пуск двигателя.
будет менятся по жесткому закону в
независимости от того как будет
происходить реальный пуск двигателя.
Более
надёжным способом пуска является
использование зависимости между
![]() .
Если задать
.
Если задать
![]() ,
то получим закон изменения
.
Для задания этого доп. вход информации
по которому поступает МП данные. Этот
канал состоит из датчика частоты вращения
ДЧВ, генератора импульсов повышенной
частоты
,
то получим закон изменения
.
Для задания этого доп. вход информации
по которому поступает МП данные. Этот
канал состоит из датчика частоты вращения
ДЧВ, генератора импульсов повышенной
частоты
![]() ,
счётчика, порт.
,
счётчика, порт.
ДЧВ генерирует за каждый оборот двигателя 1 импульс. ГИ выдаёт стабильные импульсы повышенной частотыо

Счётчик подсчитывает количество импульсов N которые укладываются между двумя ДЧВ МП получив эту информацию подсчитывает время одного оборота двигателя:
![]() ,
,
![]()
Т.о.
данный канал ввода информации позволяет
рассматривать МП
![]() при реальном разгоне двигателя. Далее
МП рассчитывает преустановки ТМ, т.е.
угол управления
,
при которых
будет изменятся в соответствии с заданным
значением, т.е. так чтобы
.
После разгона двигателя до
при реальном разгоне двигателя. Далее
МП рассчитывает преустановки ТМ, т.е.
угол управления
,
при которых
будет изменятся в соответствии с заданным
значением, т.е. так чтобы
.
После разгона двигателя до
![]() угол
угол
![]() ,
а
,
а
![]() ,
произошел плавный мягкий пуск, теперь
VS
как регулирующее элементы не нужны,
поэтому при
,
МП подаём информацию на ТК – который
включает малогабаритный контактор КМ,
который своими контактами шунтирует
VS,
весь
,
произошел плавный мягкий пуск, теперь
VS
как регулирующее элементы не нужны,
поэтому при
,
МП подаём информацию на ТК – который
включает малогабаритный контактор КМ,
который своими контактами шунтирует
VS,
весь
![]() проходит через контакты
проходит через контакты