

24. Тиристорный регулятор переменного тока. Электр. Схема, принцип действия, временные диаграммы , регулировочная характеристика, области применения.
В настоящее время регулирование мощности , подводимой к приемнику энергии~ тока осущ-ся в большинстве случаев тирист. РН.
Н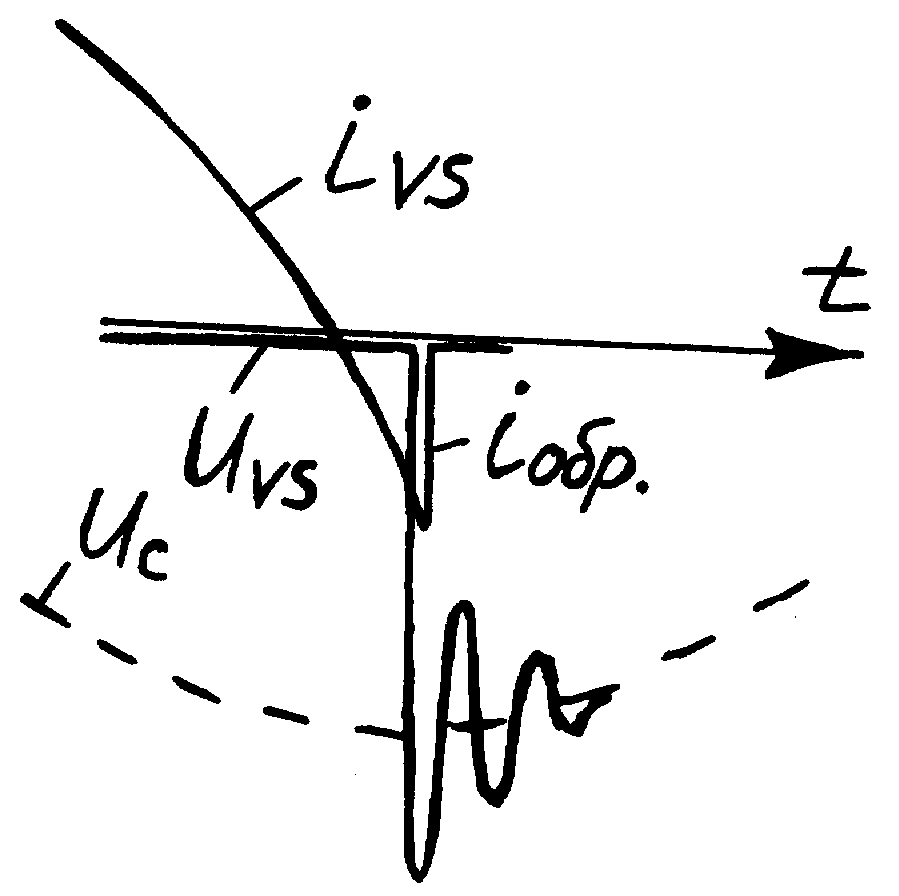 азначение
RC : Тиристор VS обладает инерционностью,
ему необх время для перехода из состояния
высокой в низкую проводимость. Поэтому
при выключении VS ток начинает нарастать
при переходе тока через 0 по тому же
закону что и при подходе к 0. В результате
при акт-инд нагрузке возн перенапряжения
, называемые коммутационными. Коммутац.
перенапряжения, зависят от L коммутационной
цепи динамич свойств VS.
азначение
RC : Тиристор VS обладает инерционностью,
ему необх время для перехода из состояния
высокой в низкую проводимость. Поэтому
при выключении VS ток начинает нарастать
при переходе тока через 0 по тому же
закону что и при подходе к 0. В результате
при акт-инд нагрузке возн перенапряжения
, называемые коммутационными. Коммутац.
перенапряжения, зависят от L коммутационной
цепи динамич свойств VS.
В
зависимости от сочетания этих факторов
max значения комм. перенапр. без принятых
мер их
могут достигать значений в (3…5) раз
Uсети(амплит). При встречно || соединении
VS коммут. перенапр-я, прикладываемые к
VS является одновременно обратными для
запирающегося VS и прямыми для отпирающегося
VS. VS боятся
![]() и
скорости
нарастания
и
скорости
нарастания
 Поэтому защитные меры должны быть
направлены как для комм. перенапряжения
так и на скорость нарастания Uпр.
Поэтому защитные меры должны быть
направлены как для комм. перенапряжения
так и на скорость нарастания Uпр.
Решение
обеих задач достигается шунтированием
VS RC-цепью. Объяснение
коммутационных напряжений и скорости
их нарастания аналогично объяснению
![]() при шунтировании контактов RC цепью.
при шунтировании контактов RC цепью.
В результате при выключении перенапряжение которое возникает- называется коммутационным. Коммутационной перенапряжение зависит от параметров коммутационной цепи и от динамических свойств VS. В зависимости от сочетания указанных факторов- без принятых мер снижения перенапряжения, оно доходит до (3…5) амплитуды Uсети. При встречно параллельном включении VS коммутационное напряжение прикладываемое к VS является одновременно для запирающего VS и прямым для отпирающего VS. Тиристоры боятся больших Uобр и большой скорости нарастания прямого напряжения. Защитные меры должны быть направлены на снижение Umax коммутирующего, так и на скорости нарастания ↓Uпр. Это достигается шунтирование VS RC цепью. Объяснение ↓ коммутационных напряжений и их нарастанию , объяснено Uзк при шунтировании тиристоров RC цепью.
Р егулирование
действующего значения ≈U, осуществляется
фазовым способом, то есть регулирование
фазы включения VS путём изменения угла
управления α. При этом регулируется
угол проводимости λ VS. При активной
нагрузке λ=π- α. Поэтому при ↑α то ↓
действующее значение U на нагрузке.
егулирование
действующего значения ≈U, осуществляется
фазовым способом, то есть регулирование
фазы включения VS путём изменения угла
управления α. При этом регулируется
угол проводимости λ VS. При активной
нагрузке λ=π- α. Поэтому при ↑α то ↓
действующее значение U на нагрузке.

Регулировочная характеристика.
При активно индуктивной нагрузке Lн препятствует резким изменениям тока и затягивает длительность прохождения тока на угол λз. λ=(π- α)+ λз. При этом на интервале от α…π Iн совпадает с U и → мощность отдаётся в нагрузку; λз на интервале U становится «-», а Iн «+», энергия накопленная в нагрузке возвращается к источнику питания.
В ωt=α+λ Iн=0 и работающий VS выключается и наступает без токовая пауза, до момента включения встречного тиристора. , который включается в момент подачи управляющего импульса и регулятор напряжения работает в режиме РПТ. При ↑α длительность интервала при котором энергия поступает из сети в потребитель ↓, ↓ длительность при котором энергия возвращается в сеть → безтоковая пауза возрастает . при этом U на нагрузке с ↑α будет ↓, но регулировочная характеристика пойдёт выше относительно характеристике при активной нагрузке. Возрастание действующего значения Uн при одном и том же угле α объясняется большей площадью ограниченной кривой напряжения (временные диаграммы).
П ри α=φн=arctg(ωLн/Rн) безтоковая пауза исчезает. Ток становится синусоидальным, наступает РИТ. При котором Uн= Uн.max=Uc, при дальнейшем ↓α Uн остаётся постоянным и равно Uc, РН при 0…φк не регулирует Uн, то есть в режиме РНТ РН не осуществляет регулирование напряжения Uн. При этом тиристоры включаются не в момент поступления управляющих импульсов, а в естественные моменты перехода тока через 0, или на управляемом входе будет управляющий импульс.
Регулирование с α> φн.
При индуктивной нагрузке РПТ и регулирование Uн начинается при α=900, при этом регулировочная характеристика идёт ещё выше.
Вывод:
1. Uн зависит не только от Uс,α, но и от характера нагрузки.
2. Uн регулируется только в РПТ, когда α> φн так как в процессе работы φн может измениться, то управляющие импульсы должны быть длительными.