

5. Расчет энергетических показателей ир-ад с фазным ротором.
5.1 Определение потерь асинхронных электроприводов с импульсным управлением.
Для оценки энергетических качеств асинхронных электроприводов с импульсным управлением, а также для выбора элементов привода необходимо знать его к.п.д. и коэффициент мощности.
Рассмотрим энергетическую диаграмму асинхронного привода с импульсным управлением. Двигатель потребляет из сети электрическую энергию, характеризуемую мощностью:
![]() ,
,
где
![]() ,
,![]() ,
,![]() -
соответственно число фаз, фазное
напряжение, ток и коэффициент мощности
обмотки статора.
-
соответственно число фаз, фазное
напряжение, ток и коэффициент мощности
обмотки статора.
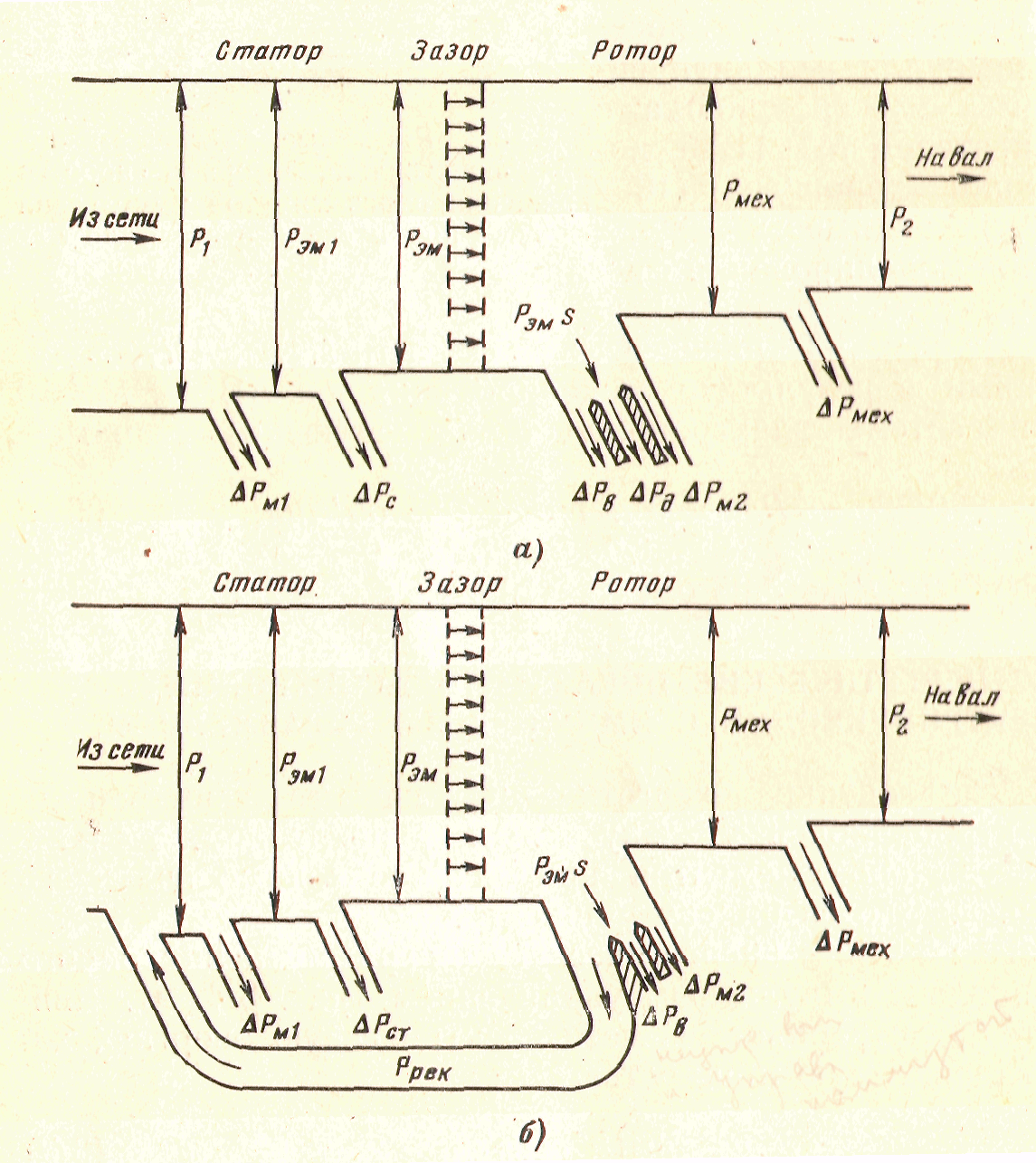
Рисунок 13. Энергетические диаграммы электроприводов с импульсным регулированием:
а) без использования энергии скольжения; б) с рекуперацией энергии скольжения в сеть.
Как видно из энергетической диаграммы, мощность скольжения после покрытия потерь в меди обмотки ротора и вентильных устройств управления поступает в сеть. Это существенно повышает технико-экономические показатели привода.
В соответствии с энергетическими диаграммами для двигательного режима работы привода к.п.д. можно определить из равенства:
 ;
;
где
![]() -
полезная мощность на валу двигателя,
-
полезная мощность на валу двигателя,
![]() -
суммарные потери в приводе, определяемые
в соответствии с выражением
-
суммарные потери в приводе, определяемые
в соответствии с выражением
![]() ,
,
где
![]() и
и
![]() -
соответственно постоянные и переменные
потери в приводе.
-
соответственно постоянные и переменные
потери в приводе.
Под постоянными потерями понимают потери, которые не зависят от тока нагрузки.
Для
асинхронного двигателя при работе в
обычных схемах включения за постоянные
потери принимают потери в меди статора
от намагничивающего тока
![]() ,
потери в стали статора и ротора,
механические и дополнительные потери.
При изменениях нагрузки и скорости
вращения двигателя постоянные потери
остаются практически неизменными, так
как потери в статоре не изменяются, а
потери в стали ротора и механические
потери изменяются в противоположных
направлениях.
,
потери в стали статора и ротора,
механические и дополнительные потери.
При изменениях нагрузки и скорости
вращения двигателя постоянные потери
остаются практически неизменными, так
как потери в статоре не изменяются, а
потери в стали ротора и механические
потери изменяются в противоположных
направлениях.
При несинусоидальных токах постоянные потери в асинхронном двигателе увеличиваются примерно на 5%, что объясняется увеличением потерь в стали за счет высших гармоник в токах статора и ротора. Таким образом, постоянные потери в схеме с импульсным управлением в цепи выпрямленного тока могут быть определены в соответствии с равенством:
 ,
,
Переменные потери в приводе зависят от нагрузки и определяются из равенства:
![]() ,
,
где
![]() и
и
![]() -
потери в меди статора и ротора,
-
потери в меди статора и ротора,
![]() -
потери в вентилях неуправляемого моста
и управляемого коммутатора,
-
потери в вентилях неуправляемого моста
и управляемого коммутатора,
![]() -
потери в добавочном сопротивлении или
в цепи неуправляемого преобразователя
энергии.
-
потери в добавочном сопротивлении или
в цепи неуправляемого преобразователя
энергии.
Приведенная
эмпирическая формула имеет приближенный
характер, поэтому целесообразно
определять потери на основании
осциллограмм анодного тока и напряжения.
Однако при частотах до 200 Гц коммутационные
потери не превосходят 2-5% потерь за счет
падения напряжения в вентилях при
прохождении прямого тока и, следовательно,
можно полагать, что
![]() .
Таким образом, суммарные потери в приводе
с «импульсным» сопротивлением:
.
Таким образом, суммарные потери в приводе
с «импульсным» сопротивлением:
 ;
;
 .
.
5.2 Определение коэффициента мощности.
Более простое, а вместе с тем и достаточно точное выражение для определения коэффициента мощности может быть получено из известного в вентильном электроприводе равенства:
 ;
;
где
![]() -
коэффициент искажения тока, учитывающий
влияние высших гармонических тока;
величина коэффициента искажения может
быть определена в соответствии с
равенством:
-
коэффициент искажения тока, учитывающий
влияние высших гармонических тока;
величина коэффициента искажения может
быть определена в соответствии с
равенством:

-
коэффициент мощности асинхронного
двигателя при совпадении по фазе
питающего напряжения
и тока ротора
![]() .
.
Из векторной диаграммы следует, что:
 ;
;
В соответствии с формулой половинного угла:
 .
.