

Классификация рулевых управлений
Рулевые управления различаются по нескольким основным признакам. Бывают автомобили с левым и правым рулевыми управлениями, предназначенные соответственно для правостороннего и левостороннего дорожного движения. Применяется различное расположение управляемых колес. Варианты их расположения показаны на рис. 13.5.
Варианты 1а и 16 равноценны по величине радиуса поворота, но вариант 16 имеет более сложный рулевой привод, а движение автомобиля с задними управляемыми колесами менее устойчиво и отличается повышенной амплитудой рыскания и неустойчивостью на переходных режимах (начало и конец поворота). Увеличение рыскания объясняется двумя причинами. Во-первых, более длинный и сложный рулевой привод имеет, как правило, меньшую жесткость и больше зазоров. Во-вторых, при отклонении от прямолинейного направления движения тело водителя, располагающегося обычно внутри базы автомобиля, испытывает тем меньшие боковые ускорения, чем ближе водитель расположен к неуправляемым колесам. Поэтому, в случае расположения управляемых колес сзади получая, информацию о начавшемся отклонении автомобиля от заданной траектории, водитель может запаздывать с ответным воздействием на рулевое колесо. Неустойчивость заднеуправляемого автомобиля на переходных режимах обусловлена особенностями создания стабилизирующего момента на задних управляемых колесах. К недостаткам заднеуправляемых автомобилей следует отнести также их неспособность отъезжать передним ходом с крутым поворотом от боковых препятствий (тротуаров, стенок и т.п.).
Но у варианта 16 есть некоторое преимущество в маневренности. Оно заключается в том, что въезд в узкие места с одновременным поворотом автомобиля легче осуществляется при задних управляемых колесах. Иллюстрацией сказанного служит факт выполнения некоторых маневров на обычных автомобилях задним ходом, например парковка у тротуара в стесненных условиях. Этим объясняется, что задние управляемые колеса применяются в основном на тихоходных транспортных средствах, которым требуется повышенная маневренность (автопогрузчики, внутризаводской транспорт и т.п.).
Вариант 1в со всеми управляемыми колесами, при повороте задних колес в противоположном направлении, позволяет существенно уменьшить радиус поворота, но применяется крайне редко ввиду повышенной сложности рулевого привода и неустойчивости движения автомобиля, особенно короткобазного, с высокими скоростями вследствие его высокой чувствительности к малым поворотам рулевого колеса.
Представленные на рис. /3.5варианты 2а и За являются аналогами варианта 1а для двухосных автомобилей с той разницей, что неуправляемые задние колеса трех- и четырехосных автомобилей на поворотах имеют повышенное боковое скольжение.
Автомобили, выполненные по схеме 26, имеют по сравнению с автомобилями, сделанными по схеме 2а, более сложный рулевой привод. Такие конструкции на дорожных автомобилях применяются лишь тогда, когда вертикальная реакция одиночного переднего моста существенно превышает допустимую законодательством норму и приходится использовать впереди два моста. Однако специальные автомобили, предназначенные для бездорожья, в частности для преодоления широких рвов, и имеющие поэтому средний мост, расположенный вблизи вертикали, проходящей через центр масс автомобиля, почти всегда выполняются по этой схеме.
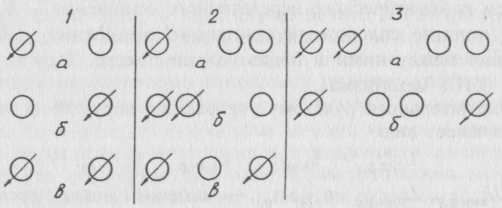
Рис. 13.5. Варианты конструктивных схем расположения управляемых колес
Исключение составляют некоторые отечественные специальные автомобили, у которых управляются передние и задние колеса (схема 2в), что радикально улучшает маневренность при удовлетворительной устойчивости движения. Схема 36 эквивалентна схеме 2в (при сближенных средних мостах), но более эффективна, так как четырехосные автомобили обычно имеют большую длину и повышение маневренности для них имеет большее значение.
В последние годы появились легковые автомобили, выполненные по схеме 1в, рулевое управление которых обладает специфическими возможностями. При маневрировании, то есть при малых скоростях движения автомобиля и больших углах поворота рулевого колеса, задние колеса, как на обычном полноуправляемом автомобиле, поворачиваются в противоположную по отношению к передним сторону. Но при движении автомобиля с большой скоростью и малыми углами поворота рулевого колеса задние колеса поворачиваются в ту же сторону, что и передние, правда на существенно меньший угол. Этим достигается заметное улучшение поперечного маневрирования (быстрота смены полосы движения) в потоке автомобилей.
Кроме указанных выше признаков классификации, рулевые управления различаются конструкцией рулевых механизмов, а также наличием и типом усилителя рулевого привода.