

Дані для виконання завдання 4
Варіанти кінематичних схем механізмів представлені рис.4.1.
Величини, необхідні для розрахунку, вибирають із табл. 4.
Таблиця 4
Дано |
Передостання цифра шифру |
|||||||||
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
,м |
|
|
|
|
|
|
|
|
|
|
, м |
2,0 |
2,4 |
2,7 |
3,0 |
3,2 |
3,6 |
3,9 |
4,0 |
4,9 |
4,2 |
|
0,32 |
0,34 |
0,36 |
0,38 |
0,4 |
0,42 |
0,44 |
0,46 |
0,42 |
0,36 |
, м |
0,16 |
0,17 |
0,18 |
0,19 |
0,20 |
0,20 |
0,18 |
0,16 |
0,20 |
0,12 |
, м |
0,08 |
0,09 |
0,1 |
0,12 |
0,14 |
0,12 |
0,1 |
0,08 |
0,07 |
0,06 |
, кг |
200 |
250 |
300 |
350 |
400 |
350 |
300 |
250 |
200 |
180 |
Вказівки до послідовності виконання завдання
1. Визначаємо лінійну швидкість і
прискорення вантажу
![]() в момент часу
в момент часу
![]() ,
коли він подолає задану відстань
,
коли він подолає задану відстань
![]() :
:
![]() ,
, ![]() .
.
2. Визначаємо кутову швидкість і кутове прискорення барабана, на який намотаний трос з вантажем (а отже, і колеса, що жорстко закріплено на одному валу разом із барабаном):
![]() ,
, ![]()
де
![]() –
радіус барабана з індексом
–
радіус барабана з індексом
![]() =
1,2,3 в залежності від варіанту завдання.
=
1,2,3 в залежності від варіанту завдання.
3. Згідно варіанту кінематичної схеми,
визначаємо передаточне число
![]() ,
як відношення радіусів веденого колеса
(кутова швидкість якого дорівнює кутовій
швидкості барабана
)
і ведучого колеса приводу.
,
як відношення радіусів веденого колеса
(кутова швидкість якого дорівнює кутовій
швидкості барабана
)
і ведучого колеса приводу.
4. Визначаємо кутову швидкість і кутове
прискорення вала приводу, на якому
закріплено колесо із заданою точкою
![]() :
:
![]() .
.
5. Значення колової швидкості точки
в момент часу
![]() розраховується за формулою:
розраховується за формулою:
![]()
де
![]() - радіус кола, по якому рухається точка
.
- радіус кола, по якому рухається точка
.
6. Визначаємо лінійне прискорення точки , що має тангенціальну і нормальну складові:
![]() ,
,
Повне прискорення точки визначаємо за формулою:
![]() ,
,
7. Зображуємо знайдені
вектори: швидкості –
![]() ,
тангенціального прискорення –
,
тангенціального прискорення –
![]() ,
нормального прискорення –
,
нормального прискорення –
![]() і повного прискорення –
і повного прискорення –
![]() точки
на кінематичній схемі механізму в
певному масштабі.
точки
на кінематичній схемі механізму в
певному масштабі.
8. Для визначення натягу троса
![]() використовуємо диференціальне рівняння
руху вантажу. При цьому вважаємо, що до
вантажу, як до матеріальної точки,
прикладені дві протилежно спрямовані
сили – сила реакції троса
і сила тяжіння вантажу
використовуємо диференціальне рівняння
руху вантажу. При цьому вважаємо, що до
вантажу, як до матеріальної точки,
прикладені дві протилежно спрямовані
сили – сила реакції троса
і сила тяжіння вантажу
![]() .
Обираємо напрям осі
у бік руху вантажу і в проекції на цю
вісь складаємо диференціальне рівняння:
.
Обираємо напрям осі
у бік руху вантажу і в проекції на цю
вісь складаємо диференціальне рівняння:
![]() ,
,
де
![]() – сума проекцій двох сил (
і
– сума проекцій двох сил (
і
![]() ),
які прикладені до вантажу,
),
які прикладені до вантажу,
![]() – прискорення вантажу.
– прискорення вантажу.
Розв’язавши дане рівняння, знаходимо .
Приклад 4
Вантаж Р масою
![]() із стану спокою починає опускатись на
тросі за допомогою механічного пристрою
(рис. 4.2) згідно закону
із стану спокою починає опускатись на
тросі за допомогою механічного пристрою
(рис. 4.2) згідно закону
![]() ,
де
- відстань, яку пройшов вантаж від
початкового положення (м),
- час руху (с). В момент часу, коли вантаж
пройде заданий шлях
,
де
- відстань, яку пройшов вантаж від
початкового положення (м),
- час руху (с). В момент часу, коли вантаж
пройде заданий шлях
![]() ,
визначити його швидкість і прискорення,
а також кутову швидкість і кутове
прискорення валів барабана і приводу,
швидкість і прискорення точки М та натяг
троса.
,
визначити його швидкість і прискорення,
а також кутову швидкість і кутове
прискорення валів барабана і приводу,
швидкість і прискорення точки М та натяг
троса.
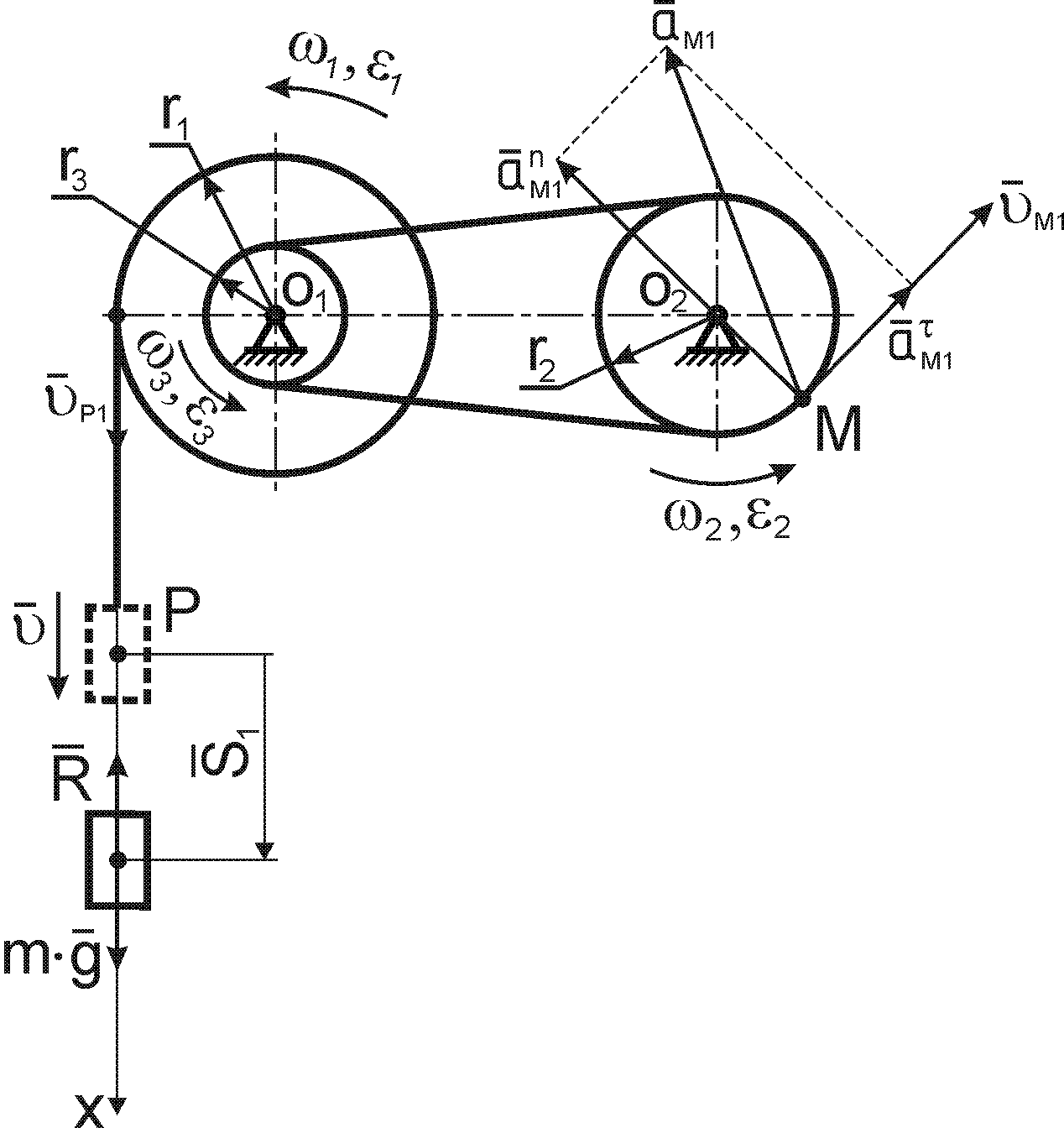
Рис. 4.2
Розв'язок
За умовою вантаж рухається поступально. Рівняння швидкості руху вантажу має вигляд:
![]() .
.
Визначимо час, коли вантаж пройде шлях :
В момент часу
![]() швидкість вантажу буде дорівнювати
швидкість вантажу буде дорівнювати
![]() .
.
Прискорення вантажу :
![]() .
.
В даному випадку прискорення вантажу не залежить від часу, тобто
![]() .
.
При опусканні вантажу барабан 1 механічного
пристрою буде обертатися із кутовою
швидкістю
![]() ,
яка визначається:
,
яка визначається:
![]() ,
,
де
![]() – колова швидкість точки на ободі
барабана (ця швидкість дорівнює швидкості
вантажу
,
так як за умовою задачі канат не
розтягується),
– колова швидкість точки на ободі
барабана (ця швидкість дорівнює швидкості
вантажу
,
так як за умовою задачі канат не
розтягується),
![]() – радіус барабана 1.
– радіус барабана 1.
Таку саму кутову швидкість буде мати
колесо радіусом
![]() ,
оскільки воно жорстко з’єднано з
барабаном і знаходиться з ним на одному
валу:
,
оскільки воно жорстко з’єднано з
барабаном і знаходиться з ним на одному
валу:
![]() ,
,
Аналогічно можна визначити кутові прискорення барабана і колеса:
![]() ,
,
![]() ,
,
Передаточне відношення при передачі обертального руху в механічному пристрої від ведучого колеса 2 приводу до веденого колеса 3 визначається як:
![]()
Звідки можна знайти кутову швидкість і кутове прискорення вала приводу, на якому закріплено колесо 2:
![]()
![]()
В момент часу визначимо колову швидкість точки , яка знаходиться на ободі колеса 2:
![]() ,
,
де
![]() – радіус кола, по якому обертається
точка
.
– радіус кола, по якому обертається
точка
.
Вектор швидкості
![]() спрямований по дотичній до колеса
радіусом
спрямований по дотичній до колеса
радіусом
![]() у бік його обертання.
у бік його обертання.
Визначимо також для прискорення точки , знайшовши його тангенціальну і нормальну складові.
Тангенціальна складова прискорення точки буде дорівнювати:
![]() .
.
Вектор прискорення
![]() спрямований по дотичній до колеса
радіусом
у бік вектора швидкості
.
спрямований по дотичній до колеса
радіусом
у бік вектора швидкості
.
Нормальна складова прискорення точки дорівнює:
![]() .
.
Вектор прискорення
![]() спрямований по радіусу
до центра колеса 2.
спрямований по радіусу
до центра колеса 2.
Повне прискорення точки :
![]() .
.
Напрямок вектора повного прискорення
![]() визначається із геометричної суми його
складових:
визначається із геометричної суми його
складових:
![]() .
.
Для визначення натягу троса замінемо зв’язок троса із вантажем реакцією , яка напрямлена вздовж троса протилежно зовнішній силі тяжіння . Такмм чином, будемо вважати вантаж матеріальною точкою, до якої прикладені дві протилежно спрямовані сили – сила реакції троса і сила тяжіння вантажу (рис. ).
Складемо диференціальне рівняння руху вантажу. Для цього оберемо напрям осі у бік руху вантажу, тобто вниз. В проекції на напрям руху вантажу будемо мати:
![]() ,
,
де
![]() – прискорення вільного падіння тіла,
– прискорення вільного падіння тіла,
![]() – прискорення вантажу.
– прискорення вантажу.
Тоді
![]()
Таким чином, трос розтягується із
зусиллям
![]() .
.
Завдання 5 - Теорема про зміну кінетичної енергії механічної системи
Механічна система складається з двох
тіл 1 і 2 , які мають масу
![]() і
і
![]() відповідно та з'єднані між собою
перекинутим через блок тросом (рис 5.1).
Система рухаються із стану спокою.
Визначити швидкість руху тіла 1 в момент
часу, коли воно пройде відстань
відповідно та з'єднані між собою
перекинутим через блок тросом (рис 5.1).
Система рухаються із стану спокою.
Визначити швидкість руху тіла 1 в момент
часу, коли воно пройде відстань
![]() після початку руху.
після початку руху.
При розв'язанні масою троса і блока знехтувати та припустити, що трос в процесі руху не деформується.
Радіус суцільного котка прийняти r= 0,2 м, коефіцієнт тертя ковзання шорсткої поверхні f = 0,2, коефіцієнт тертя кочення котка k = 0,01 м.
0 |
1 |
|
|
2 |
3 |
|
|
4 |
5 |
|
|
6 |
7 |
|
|
8 |
9 |
|
|
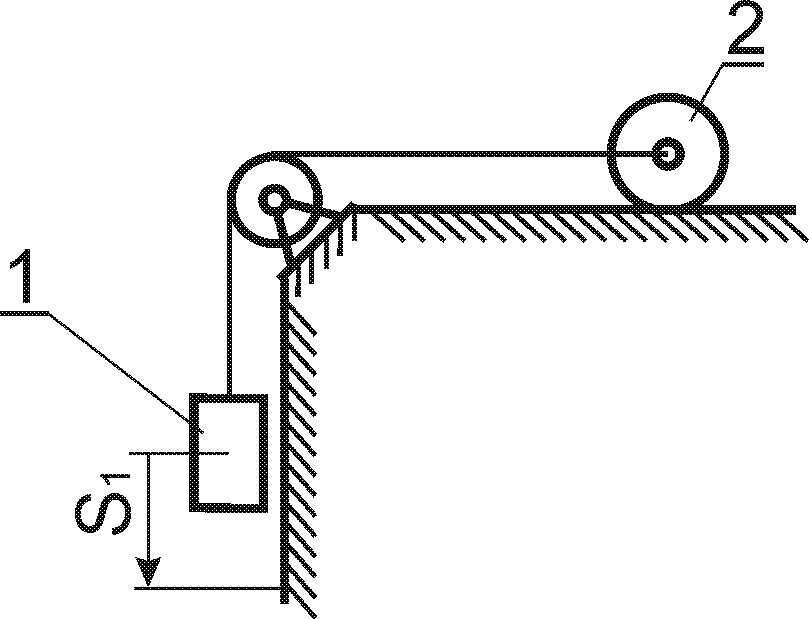
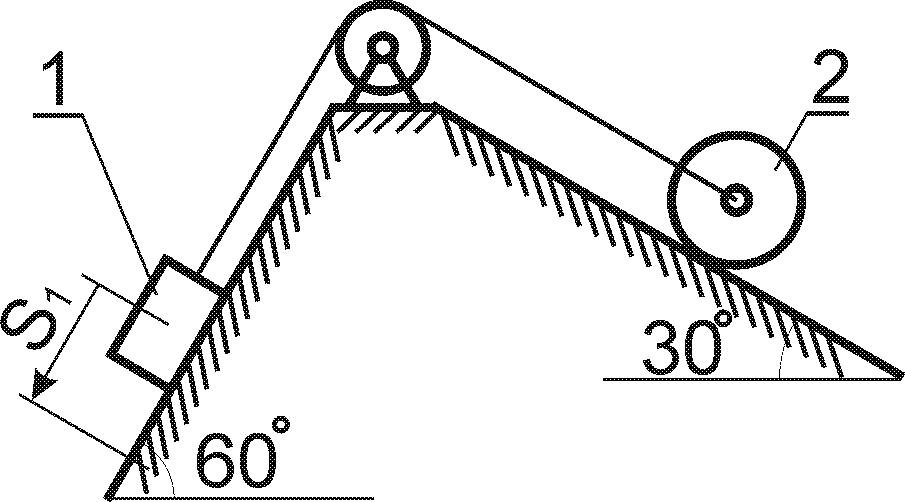
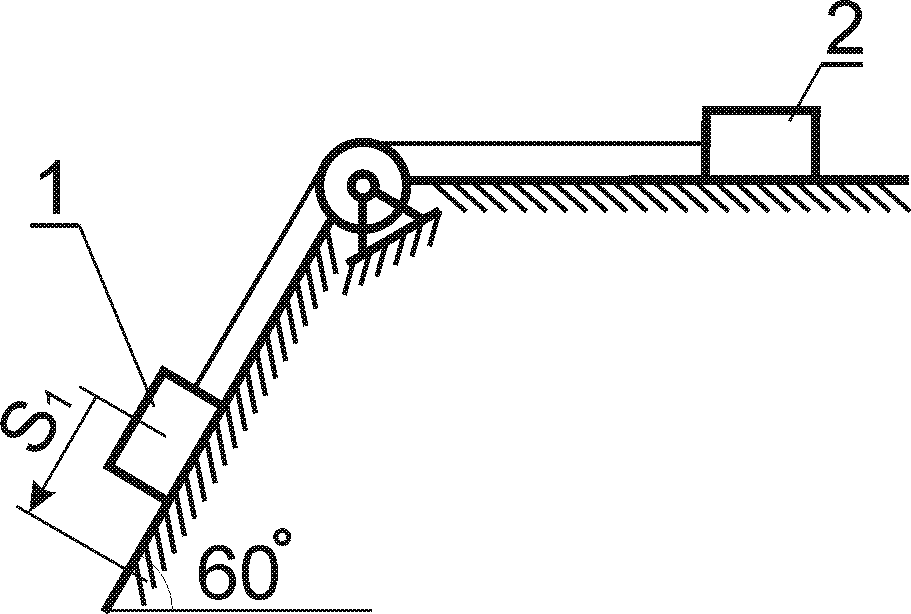
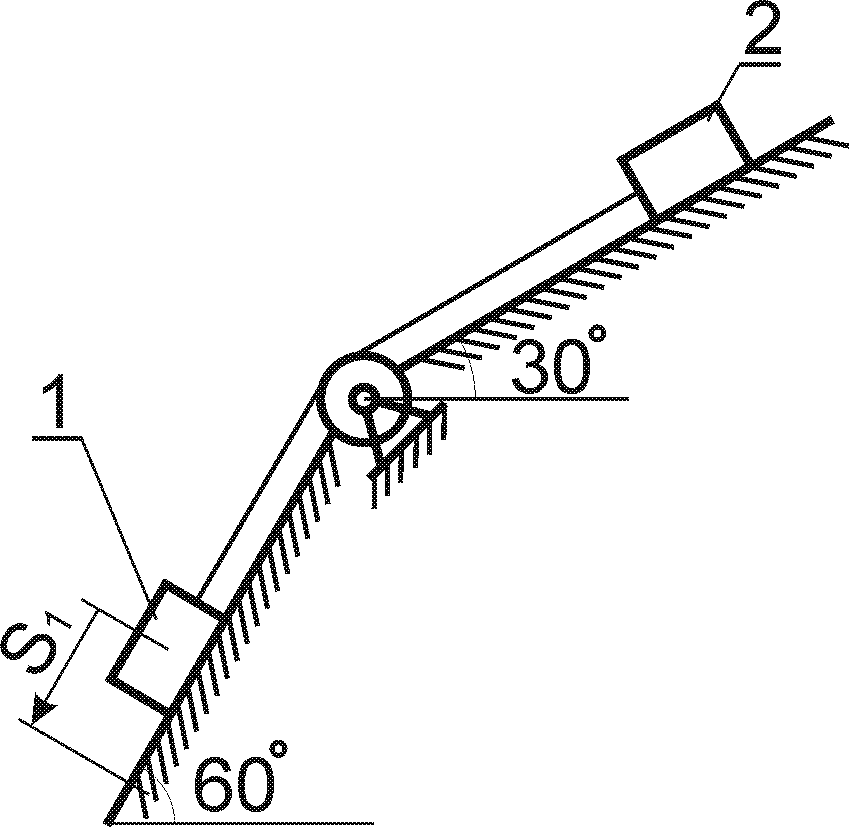
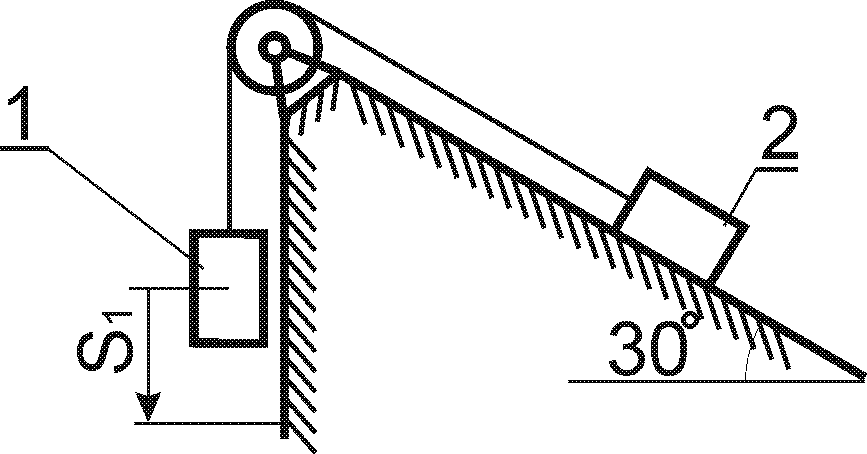
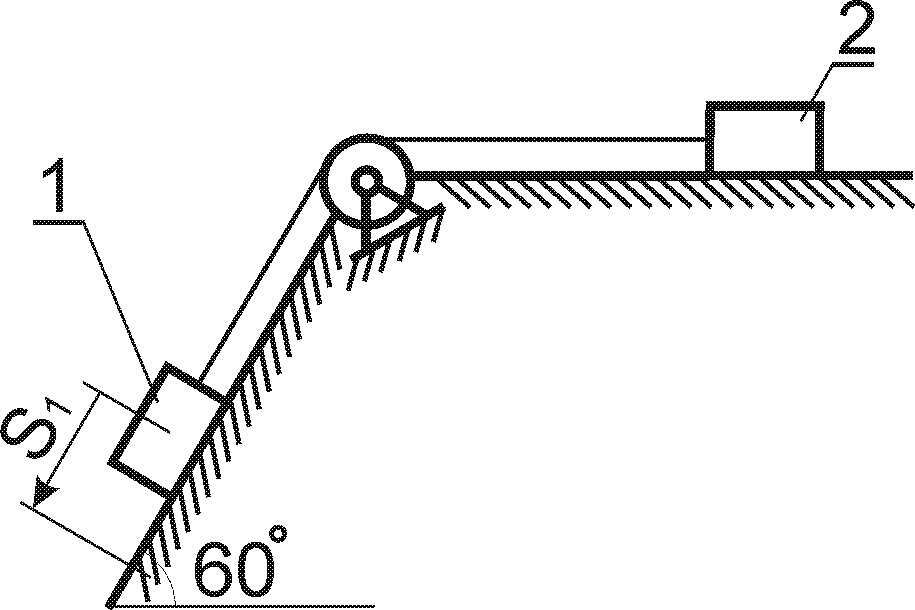
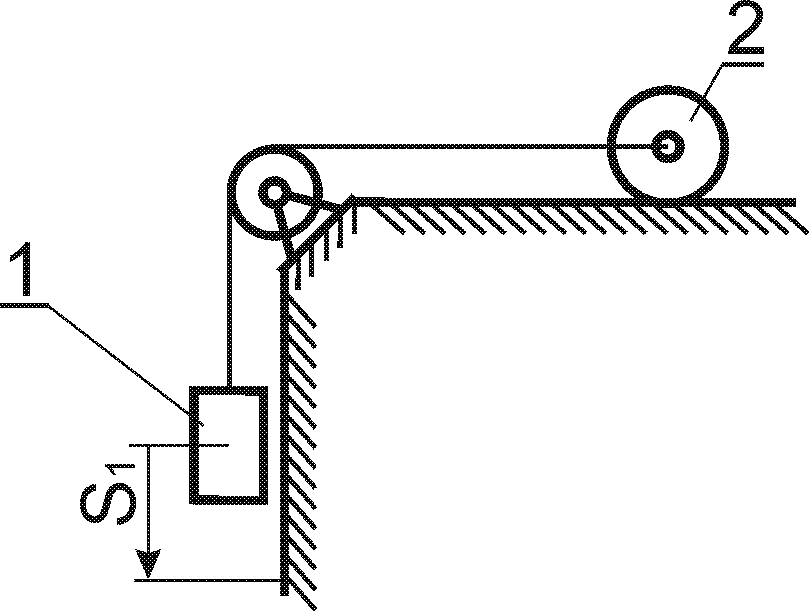
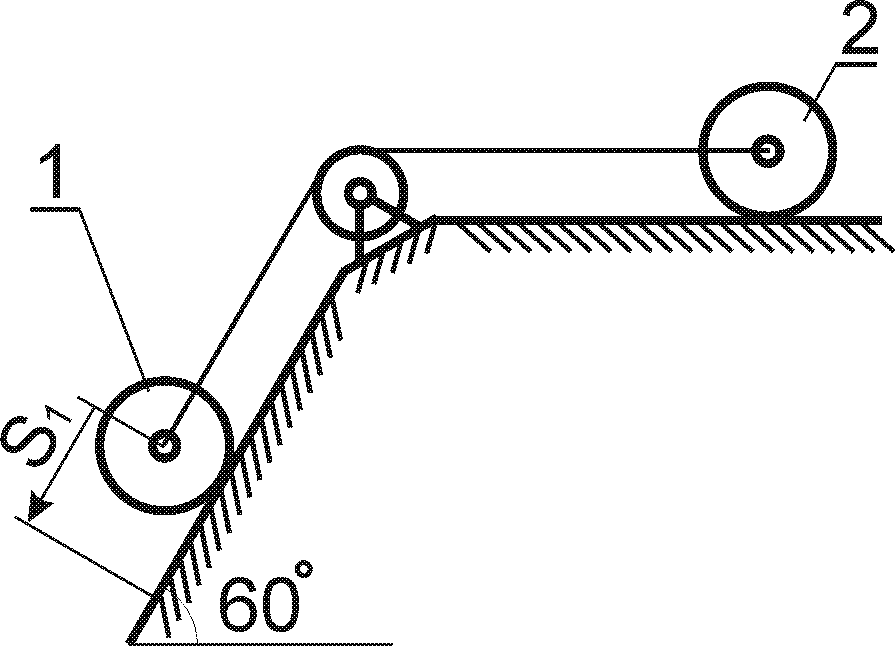
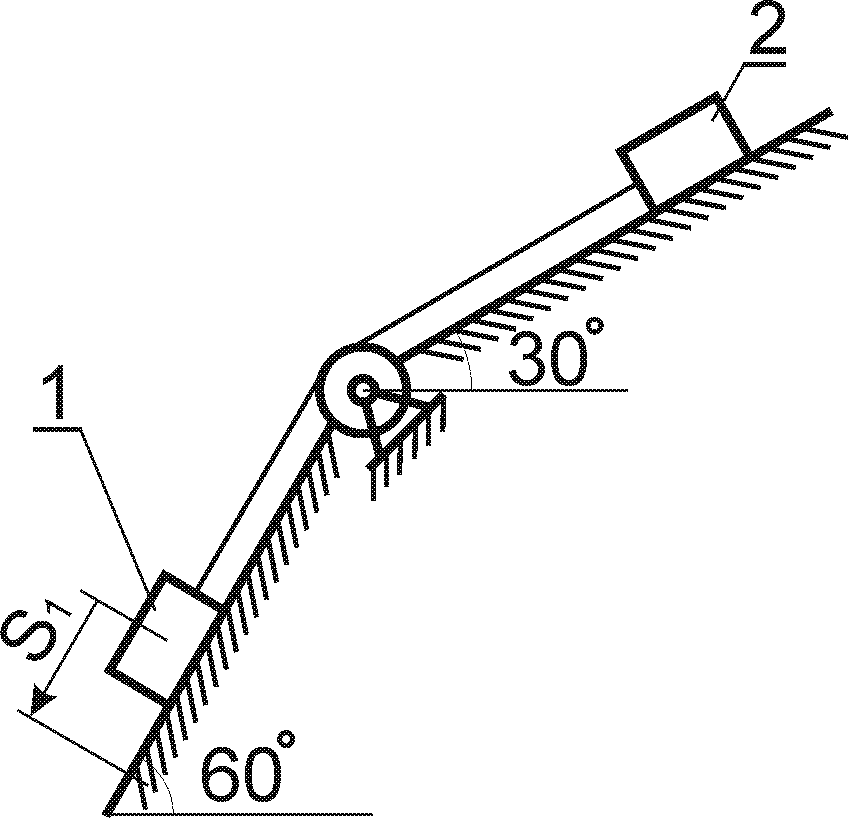
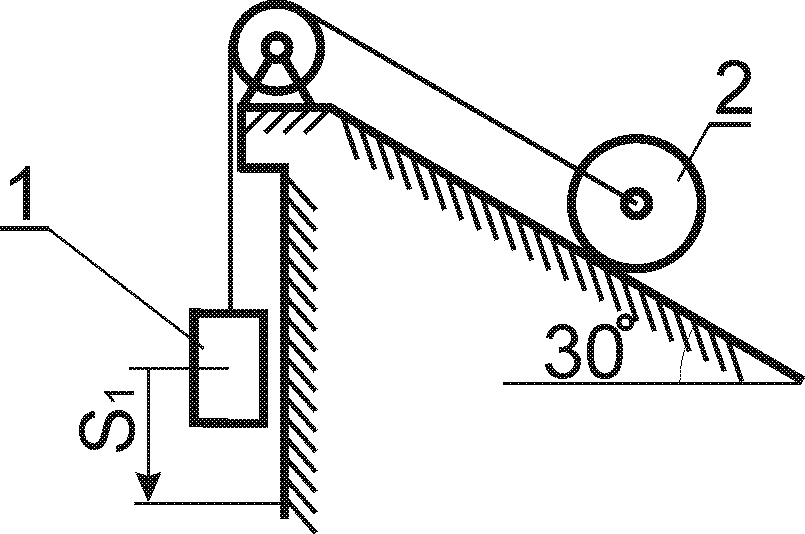
Рис. 5.1