

46. Транспорт Эл. Энергии
1) по воздушным линиям ПЛ
2) по кабельным линиям (изолированные провода)
3) по токопроводам
4) по электроводам(совокупность проводов и кабелей с их креплениями)
1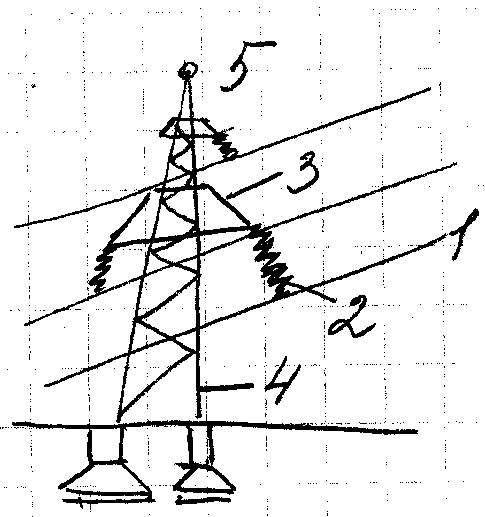 )-
провода
)-
провода
2)- изоляторы
3)-траверсы
4)-опора
5)грозозащитный трос
Опоры: дерево, металл, ж/б
Опоры: анкерные, проводные
Анкерные устанавливаются через препятствия.
М/у анкерными устан. проводные.
![]()
31. Кпд и коэф. Мощности асинхр. Двигателя
Потери мощности = потери стали(на гистерезис) + меди(в обмотках ротора и статора – зав. от нагрузки на валу) + мех. потери(трение в подшипниках и о воздух вращ-ся частей двиг-ля) + добавочные потери(опр-ся полюсацией магн. потока, в след. Зубчатого строения магнитопровода(статора)). DP=DPс+DPм+DPмех+DPдоб
Для определения потерь проводятся опыты.
Мощности определяются вольтметрами. При опыте холостого хода опред. потери мех. и стали h= [P1-(DPс+DPм+DPмех+DPдоб)] / P1
P1 – мощность, потребляемая двигателем из сети (0,9 – 95 Вт)
Коэф. мощности показывает, какая мощность, поступающая из сети, расходуется на покрытие потерь и и преобразуется в мех. работу.
Коэф. мощн. cos f = 0.7…0.8 При холостом ходе 0,2…0,3
32. Основы эл/привода
Эл/привод – эл/мех устр-во, предназнач. для электрификации и автоматизации рабочих процессов.
Структурная схема эл/привода:
![]()
ПрУ – преобр. устр-во, преобр-т I, U, частоту(трансформ-ры, управляемые выпрямители на тимистерах).
ЭДУ – эл/двиг устр-во (асинхр. двиг.), преобр. эл. энергию в мех. энергию.
ПУ – передающ. устр-во (для изменения скорости вращения до знач., необходимого рабочему мех-му): редуктор, муфта
РМ – рабочий мех-м (насосы, вентиляторы, станки…)
УУ – упр. устр-во регулирует работу всех блоков (изм. мощности на валу).
Для автом. эл/двиг-ля чел. – начальное действие(пуск), для неавтом. привода – вкл., выкл., наблюдение за работой.
Эл/приводы м.б.: 1. групповые, т.е. 1 эл/двиг-ль с пом. мех. передачи приводит в действие неск-ко раб. мех-мов; 2. одиночные, т.е. 1 раб. мех-м приводится в действие 1-м эл/двиг-м; 3. многодвиг-ные, т.е. каждый орган раб. мех-ма снабжён своим эл/двиг-м.
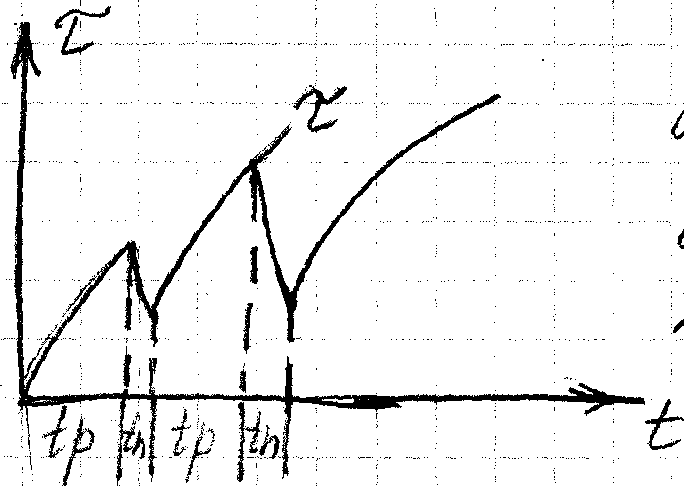
По хар-ру и длит-ти работы м.б.: 1-длит. Режима 2-кратковрем-й 3-повторно кратковр-й
![]()
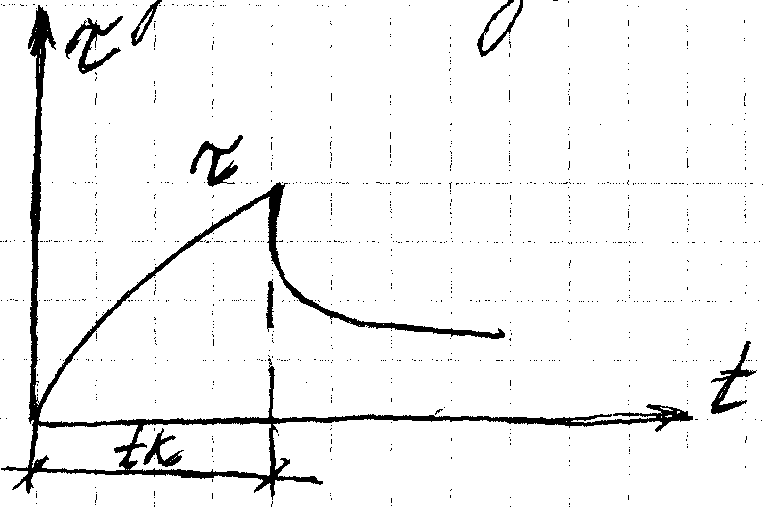
t-температура перегрева
1. t постепенно достигает установившегося значения, при кот. двиг-ль может работать длит. время (насосы, вентиляторы)
2. Двигатель работает неогранич. время tк, в теч. кот. t не успевает достичь установившегося значения, а за время откл. не успевает охладиться до температуры окр. среды (разводные мосты)
3. Время нагрузки чередуется с паузами. За время нагрузки t не успевает достичь установившегося значения, а за время паузы двигатель не успевает охладиться до температуры окр. среды.
Хар-ся повторностью включений (подъёмники, краны)
ПВ =[ tp/(tp+tn)]*100%
Эл. мех. параметры эл/двиг. Должны соотв. параметрам привод. ими мех-ов, поэтому эл/двиг выбирают по напр, току и принципу действия.
В эл/приводах в кач-ве источника перем. Тока исп-ся в пром. эл сети работающие с f=50Гц и номин. напр. Источниками постоян. тока явл-ся локальные сети котор. получ питание от вентильных или эл магнит. преобразоват. иногда питаются от автономных. Для нерегулир. эл привода применяют асинхр. двиг. с короткозамкнут. ротором. Если он не обеспеч-т необход пусковой момент или наблюд. Большой бросок пускового тока то применяют двиг с фазным ротором(для автомат. эл привода). От правильного выбора мощности эл.двиг зависит надеж-ть эл.привода и его качест. хар-ки. При недоиспольз. мощн. его КПД снижается и cosfуменьшается, соотв. капитал. затраты растут. Если нагрузка на валу двиг привышают его мощн., то он нагривается, соотв. происходит износ изоляции, сокращ, надежн и др.