

План лекции
1. 5. 5 Образование механизма из кинематической цепи.
1. 5. 6 Принцип образования механизмов по Ассуру.
1. 5. 7 Избыточные связи.
1. 5. 8 Классификация механизмов по общим свойствам.
1. 5. 9 Виды механизмов.
1. 5. 5 Образование механизма из кинематической цепи.
Рассмотрим условия, при которых из кинематической цепи может быть образован механизм. Пользуясь понятием кинематической цепи можно дать следующее определение механизму.
Механизм - это искусственная кинематическая цепь с одним неподвижным звеном, остальные звенья которой совершают определенные целесообразные движения.
Из этого определения вытекают три условия, по которому из кинематической цепи может быть образован механизм:
1. Наличие в кинематической цепи неподвижного звена.
2. Определенность в движении звеньев.
3. Замкнутость кинематической цепи (кроме механизмов манипуляторов).
Для образования из кинематической цепи механизма необходимо правильно пользоваться этими условиями. Возможны следующие
варианты соединений в кинематической цепи:
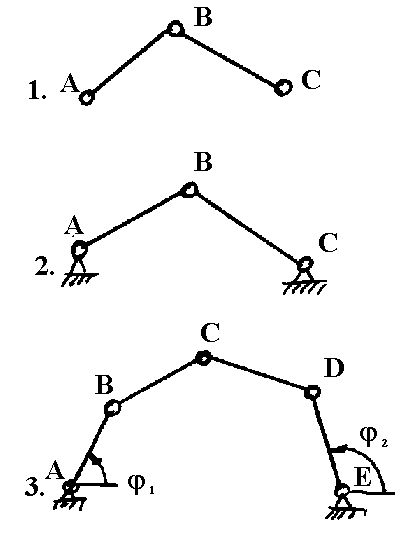
- При отсутствии неподвижного звена кинематическая цепь совершает произвольное движение.
- При введении неподвижного звена и замыкании кинематической цепи возможна потеря ее подвижности - превращение в ферму.
-
С увеличением числа звеньев кинематической
цепи возможна потеря определенности
в движении (положение звеньев ВС,
СД,
ДЕ не
зависит от положения начального
звена АВ). Определенность в.
движении
звеньев будет при назначении в качестве
начальных звеньев АВ и ДЕ,
положение
которых, в свою очередь, определяют
обобщенные координаты
![]()
Из рассмотренных примеров следует, дополнительное условие образования механизма из кинематической цепи: степень подвижности кинематической цепи должна соответствовать числу начальных звеньев и определяющих их положения обобщённых координат,
В механизме с одной степенью подвижности необходимо иметь одно начальное звено, в механизме с W= 2 должно быть два начальных звена и т. д.
1. 5. 6 Принцип образования механизмов по Ассуру.
Согласно принципу, сформулированному Ассуром механизм может быть образован последовательным присоединением к одному или нескольким первичным механизмам (начальным звеньям) одной или нескольких кинематических цепей нулевой подвижности (W = 0), причем каждая цепь должна быть подсоединена не менее чем к двум звеньям.
Первичный механизм состоит из стойки и одного подвижного звена и обладает степенью подвижности W=3*1-2*1=1;
Число первичных механизмов равно числу степеней подвижности всего механизма. Если от механизма отделить первичный механизм (начальное звено), то освободившаяся ведомая кинематическая цепь будет иметь степень подвижности равную нулю, если её присоединить к стойке освободившимися звеньями.
W=3*3-2*4=1 W=3*1-2*1=1 W=3*2-2*3=0 Кинематическая цепь, имеющая степень подвижности равную нулю получила название структурной группы Ассура.
Механизм
Начальное звено
Группа Ассура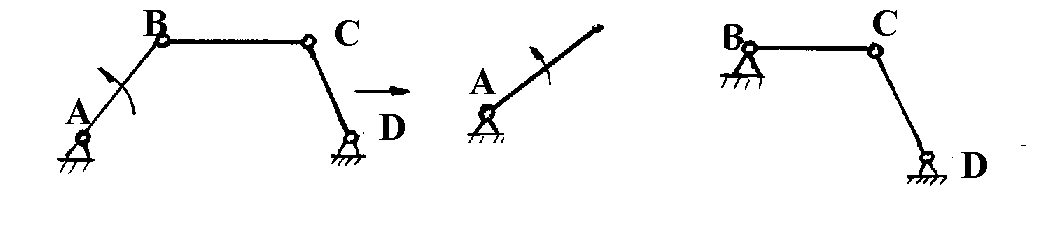
![]() ;
;
Приравняем к нулю левую часть формулы, т. к. у группы Ассура
W=
0 Тогда
![]()
Возможны
следующие варианты сочетаний
|
2 |
4 |
6 |
|
3 |
6 |
9 |
класс |
2 |
3 |
4 |
и т. д.
В соответствии с числом кинематических пар, входящих в замкнутый контур звеньев проводится классификация групп. В соответствии с числом не присоединенных кинематических пар определяют порядок группы. Класс и порядок механизмов определяется наивысшим классом и порядком группы, входящей в его состав.
Р азделять
механизм на группы нужно, начиная с
наиболее удаленной от начального
звена.
азделять
механизм на группы нужно, начиная с
наиболее удаленной от начального
звена.