

7.17 Проектирование зубчатых передач. Выбор коэффициента смещения.
7.18 Косозубая цилиндрическая передача,
7.16 Эвольвентное беззазорное зацепление. Определение
межосевого расстояния и угла зацепления. Воспринимаемое и уравнительное смещения
Покажем беззазорное зацепление пары зубчатых колес, нарезанных со смещением исходного контура.
Так как начальные окружности перекатываются без скольжения то на них толщина зуба одного колеса равна ширине впадины другого, и поэтому шаг равен сумме толщин зубьев.
![]()
Подставив значения толщин зубьев, получим

откуда угол зацепления передачи равен
![]()
обозначим
![]() -
коэффициент суммарного смещения.
-
коэффициент суммарного смещения.
![]() суммарное
число зубьев.
суммарное
число зубьев.
После этого выражение для угла зацепления принимает вид
![]()
Межосевое расстояние в зацеплении равно сумме радиусов начальных окружностей:
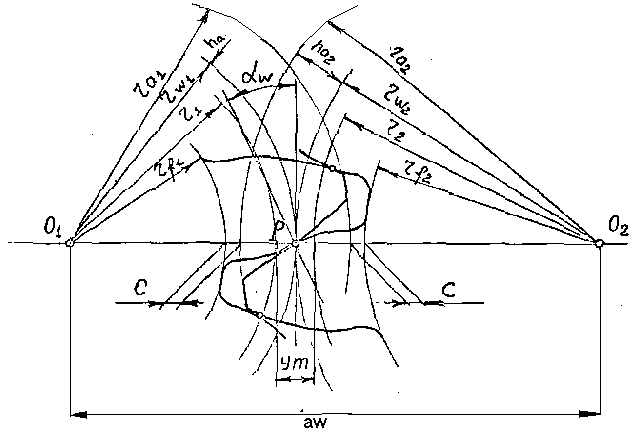
Рис. 7.16 Эвольвентное беззазорное соединение.
![]()
Иногда эту формулу записывают в следующем виде
![]()
где
![]() -
сумма радиусов делительных окружностей,
-
сумма радиусов делительных окружностей,
![]() -
расстояние между делительными окружностями
в зацеплении, называемое воспринимаемым
смещением,
-
расстояние между делительными окружностями
в зацеплении, называемое воспринимаемым
смещением,
у - коэффициент воспринимаемого смещения
который характеризует изменение межосевого расстояния и определяется выражением:

В зависимости от величины и знака суммарного смещения можно мучить три типа передач: нулевую, положительную и отрицательную
В
нулевой передаче:
![]() начальные и делительные окружности
совпадают.
начальные и делительные окружности
совпадают.
В
положительной передаче:
![]() начальные
окружности больше делительных,
начальные
окружности больше делительных,
В
отрицательной передаче:
![]() делительные окружности пересекаются,
так как они больше начальных.
делительные окружности пересекаются,
так как они больше начальных.
Воспринимаемое
смещение не равно суммарному. Если взять
![]() ,
то получится большой боковой зазор
между зубьями, во избежании которого и
осуществляется обратное смещение,
называемое уравнительным. Оно определяется
выражением
,
то получится большой боковой зазор
между зубьями, во избежании которого и
осуществляется обратное смещение,
называемое уравнительным. Оно определяется
выражением
![]()
где,
![]() -
коэффициент уравнительного смещения.
-
коэффициент уравнительного смещения.
Для того, чтобы в проектируемом зацеплении получить стандартный радиальный зазор, в станочном зацеплении уменьшают высоту зуба на величину уравнительного смещения.
Высота начальной головки зуба определяется выражением:
![]()
откуда коэффициент начальной высоты головки зуба равен
![]()
Этот коэффициент входит в формулу для определения Zmin из условия отсутствия заклинивания.
7.17 Проектирование зубчатых передач. Выбор коэффициента смещения.
Сравнивая нулевую, положительную и отрицательную зубчатые передачи следует иметь в виду,что вся технология зубонарезания для них во всех случаях одинаковая.
Нулевые передачи широко распространены, особенно, если они составлены из нулевых колес с равноделенным шагом. Они обладают денным свойством взаимозаменяемости. У равносмещенной передачи малое колесо может иметь число зубьев меньше 17.
Положительная передача обладает наибольшей изгибной и контактной прочностью и износостойкостью. Однако следует помнить, что она имеет меньший коэффициент перекрытия, и при увеличении коэффициентов смещения может наступить заострение зубьев.
Отрицательную передачу применяют реже, так как она обладает худшим эксплуатационными качествами. Необходимость в её применении возникает, когда нужно вписаться в заданное межосевое расстояние.
При
назначении коэффициентов смещения
следует помнить, что верхние пределы
увеличения суммарного и частных смещений
![]() определяются
условиями отсутствия заострения зубьев,
получения минимального допустимого
коэффициента перекрытия, а нижние
пределы определяются условиями отсутствия
заклинивания передачи и подрезания
зубьев колес.
определяются
условиями отсутствия заострения зубьев,
получения минимального допустимого
коэффициента перекрытия, а нижние
пределы определяются условиями отсутствия
заклинивания передачи и подрезания
зубьев колес.
Если по этим условиям построить кривые в координатах Х1, Х2 то получим область возможных расчетных коэффициентов смещения или блокирующий контур.
Внутри
контура нанесены линии, определяющие
другие показатели зацепления:
![]()
и
![]() - линии, определяющие равную прочность
на изгиб. Блокирующие контуры приводятся
в справочнике Т.П.Болотовской,
И.А.Болотовского и др.
- линии, определяющие равную прочность
на изгиб. Блокирующие контуры приводятся
в справочнике Т.П.Болотовской,
И.А.Болотовского и др.