

1.5.3 Степень подвижности кинематической цепи.
Степенью подвижности кинематической цепи называют число ее
степеней свободы относительно неподвижного звена.
Пусть
имеется система из n
свободных звеньев. Каждое звено имеет
6 степеней свободы, а все n звеньев в
сумме
![]() степеней свободы. Если соединить эти
звенья кинематическими парами,
каждая из них наложит на относительное
движение звеньев определенной количество
связей, т.
е. отнимет
у системы часть степеней свободы. Пусть
в соединении звеньев системы имеется:
пар 5 класса
-Р5.,
пар 4 кл.
-Р4,..,
пар 1 кл.
-Р1.
Каждая пара 5 класса накладывает на
движение системы P5
связей, а все пары 5 кл. - P5-связей.
Аналогично,
все пары 4 кл. накладывают- 4Р4
связей,
3 кл. -
3P3
связей,
2 кл. -2P2
связей, I кл. - 1Р1
связей.
Общее число
связей
степеней свободы. Если соединить эти
звенья кинематическими парами,
каждая из них наложит на относительное
движение звеньев определенной количество
связей, т.
е. отнимет
у системы часть степеней свободы. Пусть
в соединении звеньев системы имеется:
пар 5 класса
-Р5.,
пар 4 кл.
-Р4,..,
пар 1 кл.
-Р1.
Каждая пара 5 класса накладывает на
движение системы P5
связей, а все пары 5 кл. - P5-связей.
Аналогично,
все пары 4 кл. накладывают- 4Р4
связей,
3 кл. -
3P3
связей,
2 кл. -2P2
связей, I кл. - 1Р1
связей.
Общее число
связей
![]() .
Тогда степень подвижности системы с
учетом всех связей
.
Тогда степень подвижности системы с
учетом всех связей
![]() (1.2)
(1.2)
Полученное выражение называется структурной формулой пространственной кинематической цепи или формулой Сомова-Малышева, Из данной формулы можно получить выражение для определения степени подвижности плоской кинематической цепи.
В плоской цепи каждое звено имеет 3 степени свободы, т. к. на движение всех звеньев уже наложены три общие связи. Все звенья этой системы имеют(6-3)n степеней свободы. Каждая кинематическая пара накладывает на относительное движение звеньев на три связи меньше, чем в пространстве. С учетом сказанного
![]() или
или![]() (1.3)
(1.3)
Полученное выражение называют структурной формулой плоской кинематической цепи или формулой Чебышева.
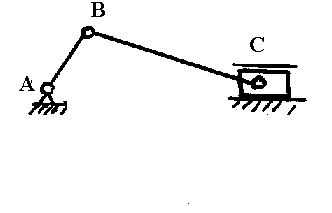
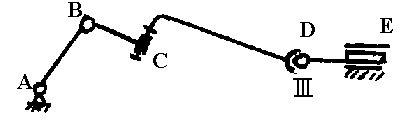
n=4 P5=4 P3=1 P4=P2=P1=0 n=3 P5=4 P4=0
W=6*4-5*4-3*1=1 W=3*3-2*4-0=1.
5. 7 Избыточные связи.
Механизмы
могут
содержать т.
н. избыточные
связи, не влияющие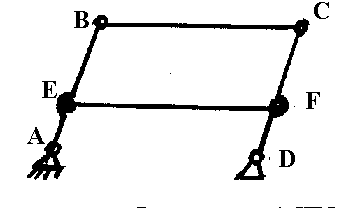 на закон движения механизма. Разберем
на примере
механизма,
привода колес электровоза смысл
избыточной связи. Введение в шарнирный
четырехзвенник АВСД звена ВГ с одной
стороны увеличивает жесткость механизма,
с другой стороны,
вследствии
различных длин звеньев ВС и ЕГ из-за
неизбежной неточности их изготовления
приводят при сборке к их натягу, откуда
увеличение давления на подшипники опор,
быстрый износ подшипников. Формула
(1.1) получена при условии, что в механизме
нет избыточных
связей.
на закон движения механизма. Разберем
на примере
механизма,
привода колес электровоза смысл
избыточной связи. Введение в шарнирный
четырехзвенник АВСД звена ВГ с одной
стороны увеличивает жесткость механизма,
с другой стороны,
вследствии
различных длин звеньев ВС и ЕГ из-за
неизбежной неточности их изготовления
приводят при сборке к их натягу, откуда
увеличение давления на подшипники опор,
быстрый износ подшипников. Формула
(1.1) получена при условии, что в механизме
нет избыточных
связей.
Однако при синтезе механизмов необходимо проверить наличие в них избыточных связей,
Число избыточных связей определяется по формуле:
![]()
Устранять избыточные связи можно изменением класса кинематических пар в механизме, при сохранении неизменности движения
Классификация механизмов по общим свойствам.
Для удобства изучения структуры кинематики и динамики механизмов их классифицируют:
1) по функциональному назначению - механизмы передачи движения (редукторы, регуляторы)
2) по структурно-конструктивному признаку – зубчатые, кулачковые, рычажные, фрикционные.
3) по структурному признаку - деление механизмов на классы.
Лекция 3.