

7.14. Толщина зуба по произвольной окружности.Условие отсутствия заострения
Из рис. 7.16, б следует: x+x=+.Учитывая, что угол в радианах есть отношение дуги к радиусу:
![]() ,
,
![]()
и что =inv, x=invx ( - угол зацепления), получим:
Р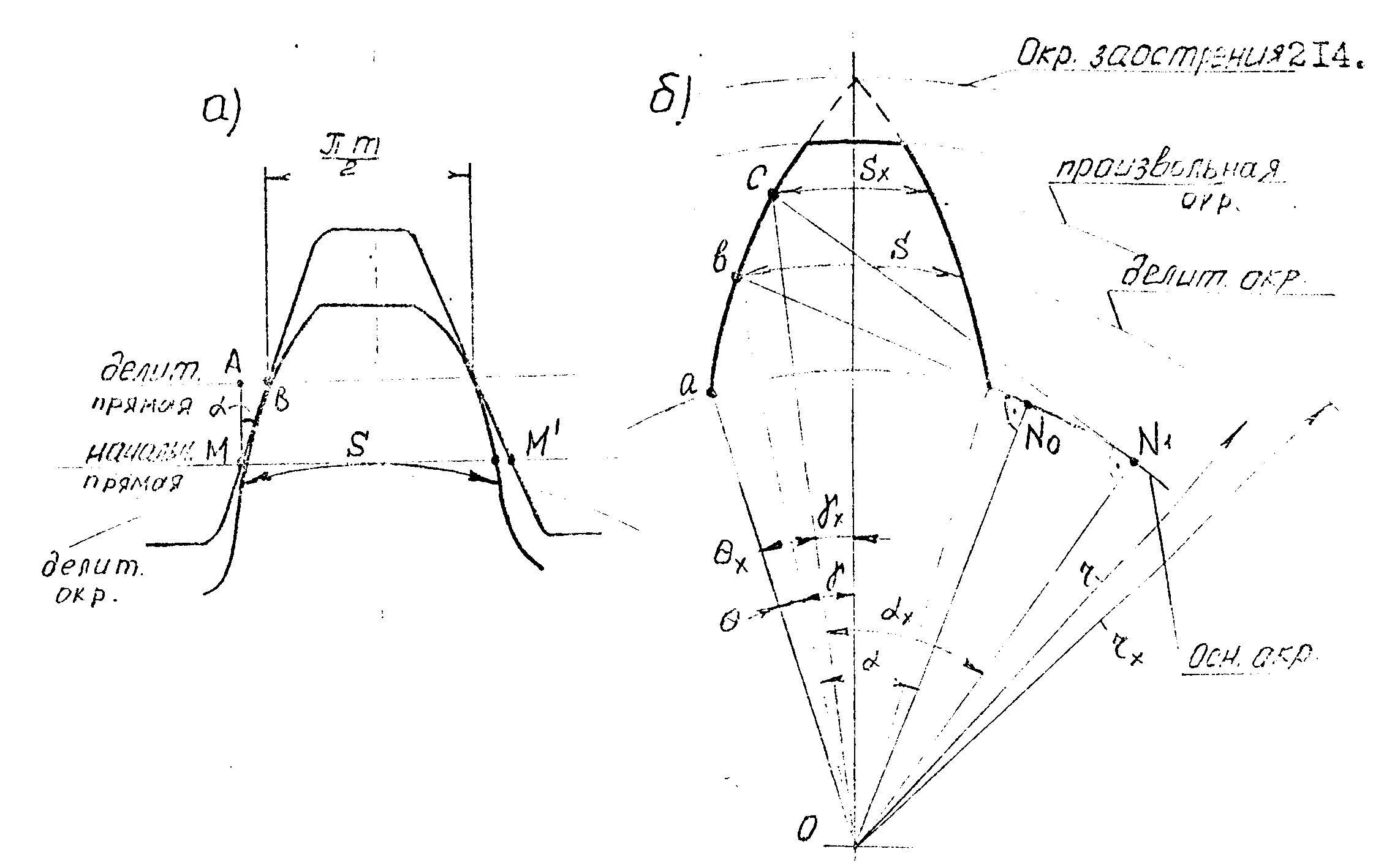 ис.
7.16. Определение толшины зуба по делительной
и произвольной окружности.
ис.
7.16. Определение толшины зуба по делительной
и произвольной окружности.
Р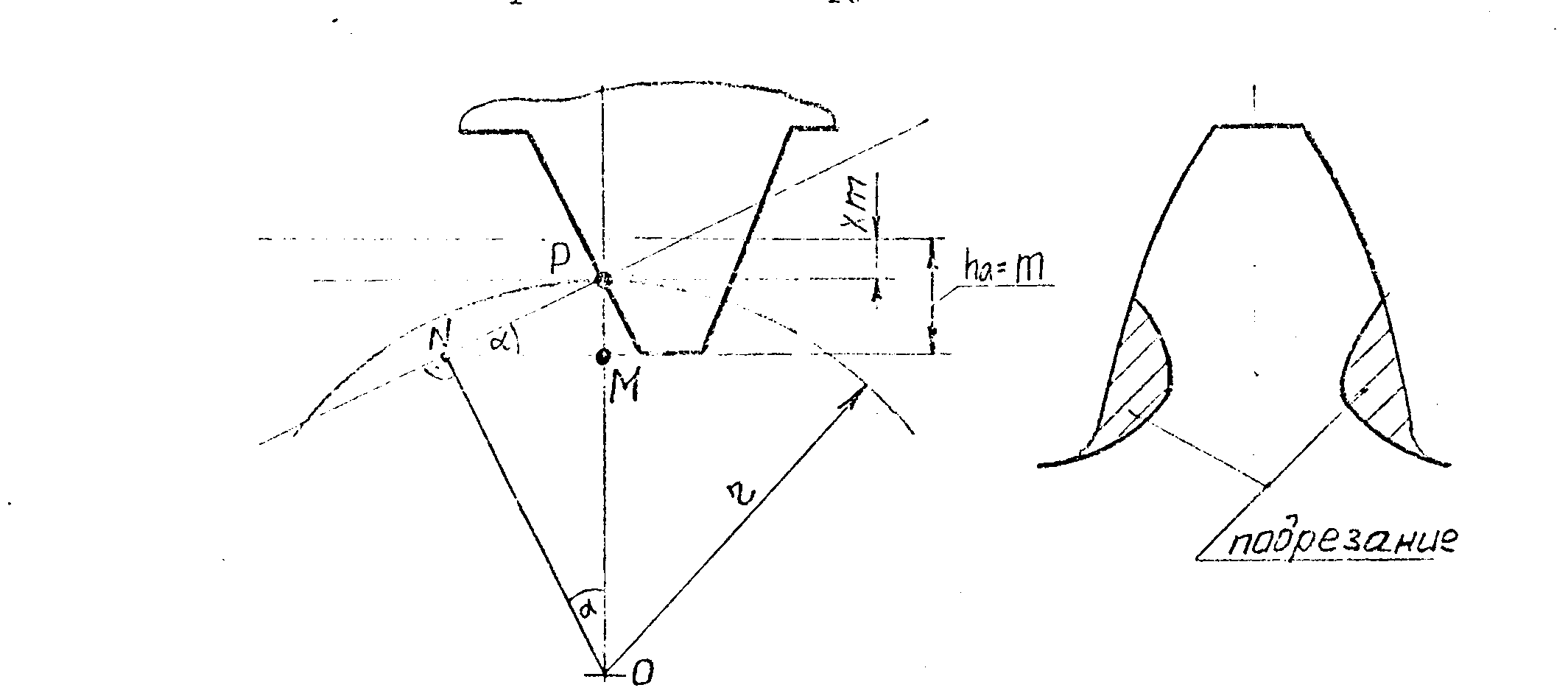 ис
7.17. Подрезание зуба.
ис
7.17. Подрезание зуба.
Р ис.
7.18. К выводу основного уровнения
зацепления.
ис.
7.18. К выводу основного уровнения
зацепления.
![]() .
.
Откуда
![]() .
.
Учитывая, что r=mz/2, rx=mxz/2,
![]() ,
,
получим окончательно
![]() ,
(7.12)
,
(7.12)
где =20, mx=px/, x=rb/rx
Условие отсутствия заострения
При нарезании положительных колес с увеличением коэффициента смещения толщина зуба у вершины Sa будет уменьшаться. При некотором xmax наступает заострение зуба, Sa =0. Эта опасность наиболее вероятна при z< 15. Во избежание излома вершины заостренного зуба коэффициент смещения назначают так, чтобы соблюдалось условие Sa0,2m где
![]()
Если условие не выполняется, необходимо уменьшить x.
Зависимость между модулями по делительной и произвольной окружностям
Из основной теоремы зацепления имеем,
rb=rcos=rxcosx ,
откуда
![]() ,
,
где rb и rx - радиусы основной и произвольной окружностей.
Учитывая, что ri=miz/2 , получим
![]() .
(7.13)
.
(7.13)
А так как mi=Pi/, то получим, что шаги по разным окружностям не равны между собой:
![]() .
.
7.15. Условие отсутствия подрезания
При малых числах зубьев обрабатываемого колоса может наблюдаться интерференция зубьев инструмента и колеса. В этом случае режущие кромки инструмента срежут часть обрабатываемого зуба, на которую они накладываются.
Срезание части номинальной поверхности у основания зуба обрабатываемого зубчатого колеса в результате интеференции зубьев при станочном запеллеяяи называется подрезанием .
Значительное подрезание ослабляет ножку зуба и может срезать часть эвольвенты, поэтому оно является недопустимым,,
Явление подрезания при нарезании совиздает с явлением заклинивания в реечной передаче. Оно происходят, когда активная линия зацепления выходит за пределы линии згщепления. В реечном зацеплении эта линия ограничена т. N (рис. 7.17.), следовательно, предельный случай, когда подрезания нет, характеризуется совпадением точек А и N , т.е. когда прямая точек притупления проходит через т. A (скругленный участок ИПК не учитывается, т.к. эвольвентная часть зуба образуется только прямолинейным участком). Условие отсутствия подрезания:
ha-xmPM
Но ha=m, а из NPM PM=PNsin.
Из PNO: PN=OPsin=mzsin/2.
Тогда
![]()
или
![]()
где xmin - наименьший коэффициент смещения, при котором отсутствует подрезание.
При =20°
![]() .
(7.14)
.
(7.14)
Ддя устранения подрезания при числе зубьев меньше 17 необходимо применять положительное смещение, определяя его величину по (7.14). При z=17 x=0, для колес с z>17 можно применять .шобое смещение. т.к. xmin<0
Лекция 30
План лекции