

6.12. Силовой расчет кулачкового механизма.
При силовом расчете кулачкового механизма в основу берутся данные, полученные для эталонного механизма. В качестве эталонного применяется внецентровый механизм с поступательно движущимся заостренным толкателем, имеющим две прямолинейные направляющие, расположенные по обеим сторонам кулачка (рис. 6.23).
Пусть толкатель нагружен силой Q, которая слагается из силы полезного сопротивления, усилия пружины, силы инерции и силы веса. Кроме того, введем следующие обозначения:
![]() ,
,![]() ,
,![]() -
нормальные реакции кулачка и направляющих
на толкатель.
-
нормальные реакции кулачка и направляющих
на толкатель.
![]() ,
,
-
соответствующие силы трения.
,
,
-
соответствующие силы трения.
f
и f’
- коэффициенты трения соответственно
между толкателем и кулачком и между
толкателем и направляющими.
![]() -
угол давления.
-
угол давления.
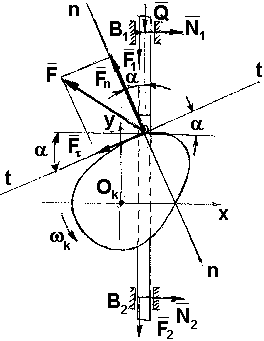
Рис. 6.2З Схема к определению сил в кулачковом механизме.
Располагая,
как указано на рис.
6.23
координатные оси и учитывая, что
![]() ;
;![]() составляем
уравнения равновесия сил, действующих
на толкатель:
составляем
уравнения равновесия сил, действующих
на толкатель:
![]() (1)
(1)
![]() (2)
(2)
где
![]() ;
;
Из
(1):
![]() ,
(3)
,
(3)
Из
(2):
![]() .
(4)
.
(4)
Исключая из этих уравнений (N1 + N2), получим:
![]()
откуда
![]()
а) при = 90 (cos = 0, sin = 1), Fn >> Q
а) при = 0 (cos = 1, sin = 0), Fn Q
Мгновенный К.П.Д. всего кулачкового механизма определяется как отношение мощности сил полезных сопротивлений О к мощности вращающего момента М, приложенного к кулачку
![]()
где V и скорости соответственно толкателя и кулачка в рассматриваемый момент времени.
Глава 7. Синтез зубчатых зацеплений. (12 часов).
Лекция 26.
План лекции
7.1. Виды зубчатых механизмов.
7.2. Основная теорема зацепления. Полюс зацепления. Центроиды колес.
7.3. Цилиндрическая эвольвентная зубчатая передача..
7.1 Виды зубчатых механизмов
Зубчатые механизмы предназначены для передачи вращательного движения от одного вала к другому. Цилиндрические - передают вращение между параллельными валами. Они получили очень широкое распространение в машиностроения благодаря большой надежности и точности в воспроизведения заданного передаточного отношения. Могут передавать большие нагрузки и достаточно просто изготавливаются. Зуб - это выступ на звене для передачи движения посредством взаимодействия с соответствующим выступом другого звена.
Зубчатое звено – звено, имеющее один или несколько зубьев.
Зубчатое колесо - зубчатое звено с замкнутой системой зубьев, обеспечивающее непрерывное движение другого звена.
Зубчатая передача - трехзвенный механизм; в котором два сдвижных звена являются зубчатыми колесами образующими с неподвижным звеном вращательную или поступательную пару,
Цилиндрические передачи классифицируют:
1. По пространственному расположению - на внешние; внутренние и реечные (рис. 7.1).
2. По форме зуба - на прямо- и косозубые (рис. 7.1). У перв.чх линия зуба параллельна оси колеса», у вторых - расположена под углом.
3. По боковой поверхности - на эвольвентные, зацепление Новикова (боковая поверхность очерчена по дуге окружности) и др.
4. По передаточному отношению.
Передаточное
отношение
-
это отношение угловой скорости ведущего
зубчатого колеса к угловой скорости,
ведомого зубчатого колеса.U1=
-![]() - для внешнего зацепления;
- для внешнего зацепления;
U1= - для внутреннего.
Передаточное число - отношение числа зубьев колеса к числу зубьев шестерни.
Колесо - зубчатое колесо передачи с большим числом зубьев.
Шестерня - колесо с меньшим числом зубьев.
Различают
передачи с положительным и отрицательным
передаточным отношением, с U>
1 (редукторы)
и U
<1
(мультипликаторы),
с U=const
и U
![]() const
(некруглые колеса).
const
(некруглые колеса).