

3.7.6. Уравновешивание шарнирного четырехзвенника.
Для рассматриваемого механизма (рис.3.36) условие будет выполняться, если установить определение соотношения между главными векторами, зависящими от величин масс и положения центра масс звеньев.
Для этого массу каждого из звеньев можно заменить сосредоточенными в центрах О, А, В и С шарниров массами, сохраняя при этом заданное положение центров масс звеньев. Для определения величины сосредоточенных масс, согласно условиям статической замены распределенной массы звена сосредоточенными массами, имеем
![]() =
=![]() ;
;
![]() =
=![]()
![]() =
=![]() ;
;
![]() =
=![]()
![]() =
=![]() ;
;
![]() =
=![]()
Откуда
![]() =
=![]() ;
;
![]() =
=
![]() =
=![]() ;
;
![]() =
=
![]() =
=![]() ;
;
![]() =
=
Суммируя массы в шарнирах А и В, получим
|
|
|
(3.35) |
Массы, сосредоточенные в шарнирах 0 и С, неподвижны, поэтому для полного уравновешивания механизма необходимо уравновесить противовесами только массы ma и mB. Рассматривая их во вращении вместе с кривошипом ОА и коромыслом ВС, можно найти противовесы из условия, что центры масс уравновешенных коромысла и кривошипа должны совпасть с центрами их вращения.
Массы противовесов G1 и G111 могут быть найдены из условия.
|
и |
|
если задаться величиной радиусов r1 и r111. После подстановки противовесов G1 и G111 в точках 0 и С.
|
и |
|
(3.36) |
Тогда центр масс механизма и противовесов будет лежать на линии центров и делить его на отрезки, обратно пропорциональные массам тo и mc .
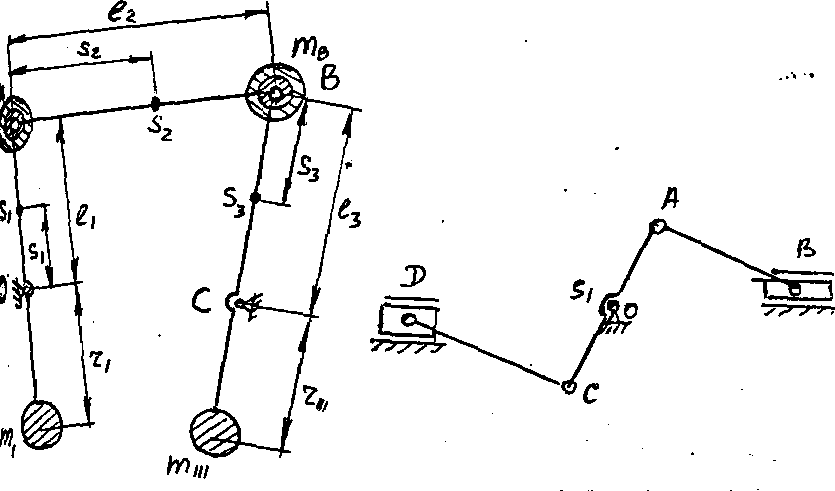
Рис.3.36 Статическое
уравновешивание механизма
Рис. З.37 Симметричный механизм
Уравновешивать механизмы не всегда выгодно, поэтому на практике часто используются различные симметричные механизмы (рис.3,37). В этих механизмах главные вектора и главные моменты сил инерции правой и левой части равны друг другу по величине и противоположны по направлению. Следовательно, главный вектор и главный момент сил инерции всего механизма равны нулю, т.е. механизм уравновешен.
3.8. Движение машин под действием заданных сил.
Изучение закона движения машины под действием заданных сил является одной из основных задач динамики машин.
При решении задач кинематики и кинетостатики в первом приближении предполагают, что закон движения ведущего звена известен, и обычно принимают скорость его постоянной. В действительности кинематические параметры являются функцией действующих внешних сил и масс подвижных звеньев. Определение истинного закона движения необходимо для учета динамических нагрузок.
Для решения этой задачи составляются уравнения движения машин, основанные на теореме об изменении кинетической энергии. Решение этих уравнений может быть осуществлено графоаналитическим или аналитическим методами для одного из режимов движения машины.
3.8.1. Режимы движения машины.
Полное время движения машины или механизма от момента начала движения до конца его движения состоит из трех частей.
1) Время разгона, когда скорость ведущего звена возрастает от нуля до некоторого среднего значения.
2) Время установившегося движения, когда скорость ведущего звена колеблется около среднего значения.
3) Время выбега - время убывания скорости ведущего звена от среднего значения до нуля.
Режимы движения машины удобно изобразить в виде тахограммы, т.е. зависимости w=w(t) где T - полное время движения; tp - время разгона ; tу.д.- время установившегося движения; tв.- время выбега. В установившемся режиме движения колебания угловой скорости ведущего звена носит периодический характер.
Время, по истечении которого кинематические параметры, характеризующие движение ведущего звена, принимают первоначальные значения, носит название цикла движения (tц). Установившееся движение есть повторяющиеся циклы tу.д =k tц. К- число циклов.
С энергетической точки зрения период разгона характерен возрастанием кинетической энергии. Работа движущих сил в этот период больше работ сил сопротивления (Aд>AC).
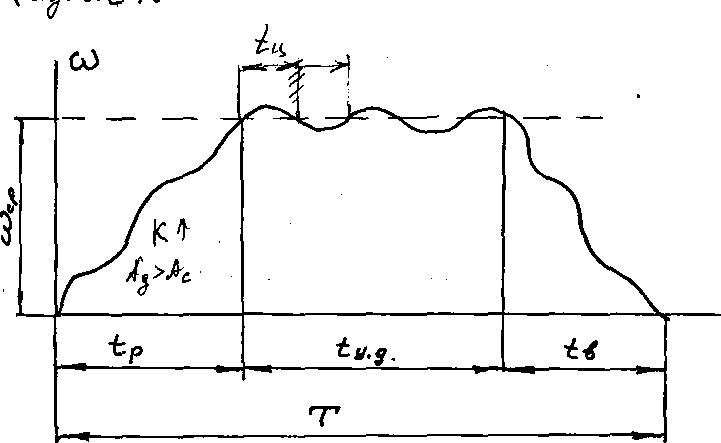
Рис.3.38 Режимы движения машины.
В период установившегося движения угловая скорость w ведущего звена колеблется около среднего положения. За цикл движения Ад=Aп.с.+Aв.с., однако внутри цикла равенство работ не обязательно.
В период выбега w изменяется от рабочей скорости до нуля, а работа Aд>AC.
Из трех режимов движения машины наиболее важен режим установившегося движения, т.к. при этом режиме производятся операции, для которых и предназначена машина.
Однако, не учитывать переходные режимы (разгон и выбег) нельзя, т.к. в этих режимах на элементы машины действуют большие динамические нагрузки.