

3.7.1 Общие условия уравновешивание вращающихся масс.
Пусть задано тело, вращающееся относительно оси Х с угловой скоростью Выделим элементарную массу mi. При вращении тела на эту массу действует сила инерции.
![]()
Выберем начало координат так, чтобы плоскость zoу проходила через центр масс тела. Разломи эту силу на две составляющие по осям z и у.
![]()
При
вращении тела сил
![]() создает
моменты сил инерции относительно осей
z
и y.
создает
моменты сил инерции относительно осей
z
и y.
![]()
![]()
где
![]()
![]() -
центробежные моменты инерции относительно
соответствующих осей.
-
центробежные моменты инерции относительно
соответствующих осей.
Суммарный момент инерции
|
Здесь Irx - центробежный момент инерции относительно
оси вращения x и плоскости zoy. Таким образом, все силы инерции вращающегося тела сводятся к главному вектору сил инерции и главному моменту,
|
|
|
(3.30) |
Здесь
m =mi
;
![]() -
радиус-вектор центра масс.
-
радиус-вектор центра масс.
Для уравновешивания тела необходимо выполнение двух условий
|
|
|
(3.31) |


При выполнении условия считается, что тело уравновешено статически” Физически это означает, что центр масс тела совпадает с осью вращения, т.е. rs=0. Статическое уравновешивание применяется к коротким деталям. для которых Mи << Fи .Статическим оно называется потому, что обнаруживается статически, т.е. деталь, положенная на призму, повернется так, что центр масс займет нижнее положение ( положение устойчивого равновесия). Для длинных деталей выполняется полное уравновешивание, т.е. обеспечиваются оба равенства.
Мерой неуравновешенности являются величины mrs - статический момент и Irs - центробежный момент инерции.
Если выполняются оба условия, то ось вращения совпадает с одной из главных центральных осей инерции (главная центральная ось инерции проходит через центр масс). Уравновешивание вращающихся деталей должно осуществляться при их проектировании, при разработке рабочих чертежей, обеспечивая распределение масс, при котором mrs=0 и Irs=0. Рассмотрим практические приемы уравновешивания деталей по чертежам.
3.7.2 Статическое уравновешивание.
Статически уравновешивают детали: малой длины, имеющие цилиндрическую конфигурацию (шкивы, диски) и малой величиной и) .
При статическом уравновешивании обеспечивается распределение масс в короткой вращающейся детали так, чтобы
mrs=0
Пусть задан диск с массами m1,m2,m3 Если тело неуравновешено, то сумма сил инерции Fu1,Fu2,Fu3, возникающих при вращении детали” равна равнодействующей
|
Следовательно, уравновесить деталь означает, что надо уравновесить равнодействующую Fr , что возможно, или удалением лишней массы в направлении радиуса-вектора, совпадающего с равнодействующей, или добавлением массы с противоположной стороны так, чтобы выполнялось условие
|
Раскрывая выражение с учетом
|
|


получим
|
Это уравнение решается графически, построением векторного многоугольника , откуда находится вектор одной величиной my или ry затем задаются, а вторую определяют из уравнения.
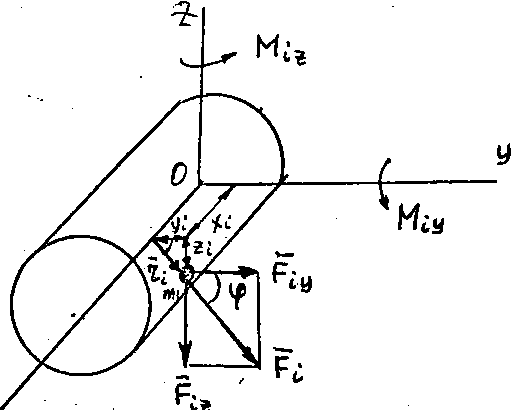
Рис. 3.30 Силы и моменты сил инерции
Рис.
3.31 Статическое
уравновешивание
Рис3.32
К определению mу
ry
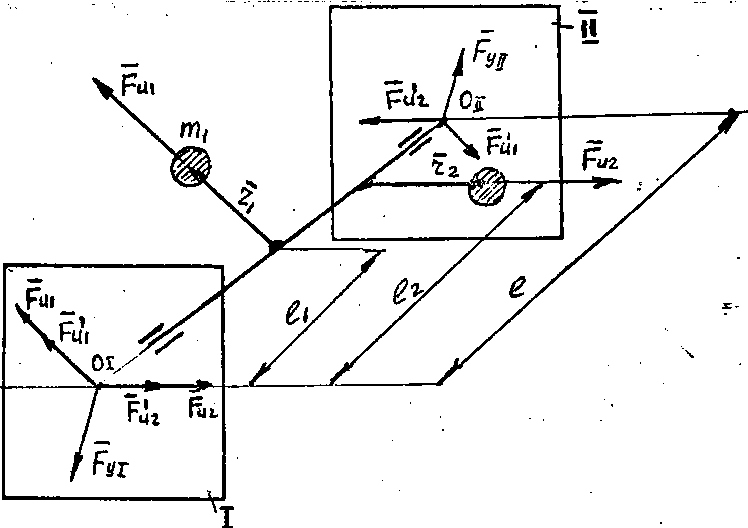
Рис.3.33 Динамическое уравновешивание