

3.5.1 Трение в поступательных кинематических
парах. Определение коэффициента трения.
Рассмотрим
поступательную кинематическую пару на
звено I массой
![]() под углом
под углом
![]() ,
в которой внешняя сила (рис.
3.18)
действует на кинематическую пару.
Разложим
эту
силу
на нормальную
,
в которой внешняя сила (рис.
3.18)
действует на кинематическую пару.
Разложим
эту
силу
на нормальную
![]() и тангенциальную составляющую
и тангенциальную составляющую
![]() .
Сила
.
Сила
![]() (где
(где
![]() -
сила тяжести звена 1) прижимает звено I
к звену 2, в результате чего появляется
сила трения
-
сила тяжести звена 1) прижимает звено I
к звену 2, в результате чего появляется
сила трения
![]() ,
препятствующая скольжению звена 1 под
действием силы
,
препятствующая скольжению звена 1 под
действием силы
![]() .
В том случае, когда
.
В том случае, когда
![]() ,
звено 1 неподвижно. При
,
звено 1 неподвижно. При
![]() звено 1 будет двигаться с ускорением
звено 1 будет двигаться с ускорением
![]() .
При изменении угла приложения внешней
силы
возможны два случая:
.
При изменении угла приложения внешней
силы
возможны два случая:
при
 звено 1 будет двигаться, т. к.
звено 1 будет двигаться, т. к.
при
![]() звено I будет неподвижно, т.к.
звено I будет неподвижно, т.к.

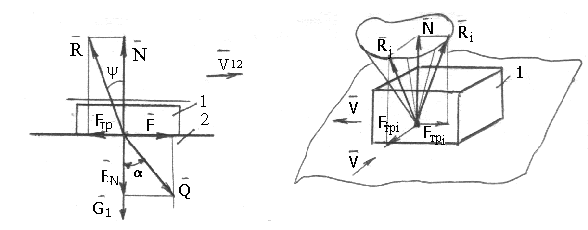
Рис.З.18 Трение в поступательной Рис.3.19 Конус трения кинематической паре.
Между
углом
![]() и коэффициентом трения
существует
определенная связь. Из силового
многоугольника (рис.3.18) т.е. коэффициент
трения
геометрически
интерпретируется как тангенс угла
трения.
и коэффициентом трения
существует
определенная связь. Из силового
многоугольника (рис.3.18) т.е. коэффициент
трения
геометрически
интерпретируется как тангенс угла
трения.
Реакция , в зависимости от направления движения звена 1 относительно звена 2, будет располагаться в различных вертикальных плоскостях, проходящих через нормаль (рис.3.19), отклоняясь от последней на угол трения. Семейство положений реакции образуют линейчатую поверхность называемую конусом трения.
Основание конуса может быть очерчено различными кривыми, вид которых связан с изменением коэффициента трения в зависимости от направления движения.
Если
сила
![]() ,
приложенная к звену 1, проходит
внутри
конуса трения, то звено находится в
покое. Для
случая
движения
сила
должна проходить вне «конуса трения».
,
приложенная к звену 1, проходит
внутри
конуса трения, то звено находится в
покое. Для
случая
движения
сила
должна проходить вне «конуса трения».
При рассмотрении случая изложенного ранее, предполагалось, что внешняя сила прижимает ползун (звено 1, рис. 3.20) направляющей второго звена всей плоскостью, а направление силы не выходит за пределы опорной поверхности.
В случае действия силы за пределами опорной поверхности и из-за наличия зазора в кинематической паре, имеет место перекос звеньев, который изменяет коэффициент трения.
Рассмотрим это явление на примере поступательной кинематической пары (рис.3.20)
Под
действием силы
в
точках контакта звеньев (точки
А
и В)
возникают реакции
![]() и
и
![]() .
Разложим эти реакции на
две
составляющие
.
Разложим эти реакции на
две
составляющие
![]() и
.
и
.
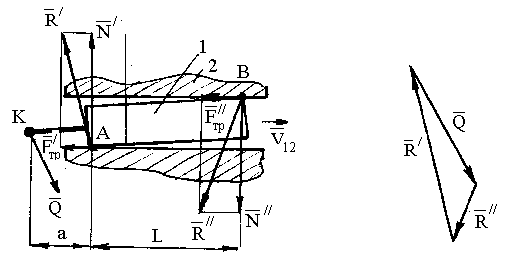
Рис. 3.20 Трение в реальной кинемати- Рис.3.21 План сил
ческой паре.
Силы трения в точках А и В равны
![]() и
и
![]()
Суммарная сила трения
![]()
а суммарное давление в условиях перекоса
![]()
Тогда приведенный коэффициент трения в этом случае
![]() (3.16)
(3.16)
Вследствие равновесия звеньев в кинематической паре, главный вектор и главный момент сил будут равны нулю. Пренебрегая силами и моментами сил инерции, которые целесообразно учитывать лишь при больших относительных скоростях движения в кинематической паре и при больших массах звеньев, составим уравнение моментов сил относительно точки К и приравняем нулю.
![]()
В этом уравнении не учтены моменты сил трения, т.к. они обычно на один или несколько порядков ниже моментов от сил N.
![]()
Подставляя последнее выражение а (3.16) находим приведенный коэффициент трения.
![]() (3.I7)
(3.I7)
При перемещении ползуна величина a будет изменяться, изменяя соответственно, и приведенный коэффициент трения .
Уменьшить
приведенный коэффициент трения
![]() можно за счет увеличения длины ползуна
можно за счет увеличения длины ползуна
![]() .
.
Условие равновесия сил, действующих на ползун
![]()
позволяет построить план скоростей, откуда можно определить реакции и , а затем и составляющие N/ и N//. (см.рис.3.21).