

2.5.2 Определение положений точек в замкнутых кинематических цепях.
Положение точки в замкнутой кинематической цепи определяете из условия замкнутости контуров.
Для этого выражают координаты точки через параметры правой и ле1 части контура и приравнивают эти параметры.
Р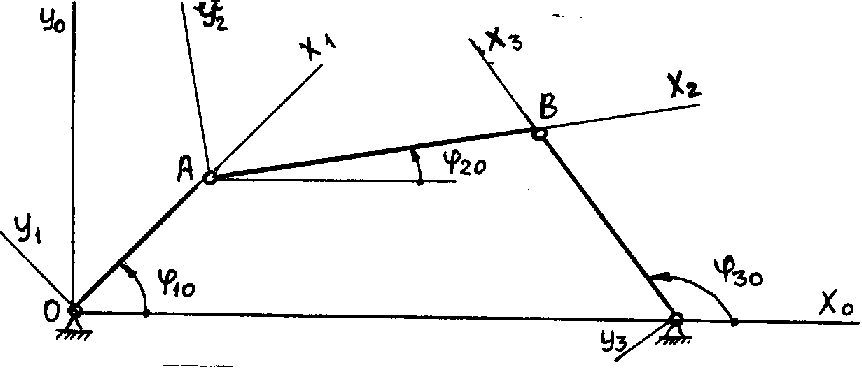 ассмотрим
плоскую замкнутую кинематическую цепь
на примере шарнирного четырехзвенника.0
ассмотрим
плоскую замкнутую кинематическую цепь
на примере шарнирного четырехзвенника.0
Рис 2. 12 Определение положения точки В в четырехзвенном шарнирном механизме.
С неподвижным и тремя подвижными звеньями свяжем свою систему координат
![]()
Известны
длины всех звеньев, координаты точки Е
в системах
![]() и
и
![]() и обобщенная
координата
и обобщенная
координата
![]() .
.
Требуется определить положение точки Е в системе S0, связанной со стойкой.
Для решения этой задачи произведем последовательный переход от координат точки Е в системе S2 к ее координатам в системе S1 ,а затем и в системе S0 через параметры левой части контура ОAB.
Первый переход описывается матричным уравнением
 т.
к.
т.
к.
![]() или
или
![]() (2.8)
(2.8)
Второй
переход
 (2.9)
(2.9)
или
![]()
Полный
переход от системы
![]() к системе
к системе
![]()
![]()
Положение точки Е через параметры левой части контура ОСВ описывается матричным уравнением
 (2.10)
(2.10)
или
![]() (2.11)
(2.11)
Приравнивая правые части формул (2. 11) и (2.8, 2. 9), выраженные
через параметры правой и левой части контура получим:
![]() (2.
12)
(2.
12)
После подстановки матриц и действий с ними получим систему двух уравнений
![]()
где
![]()
Полученная
система уравнений позволяет найти
параметры
![]() и
и
![]() ,
определяющие положение звеньев 2 и 3 в
зависимости от обобщённой координаты
,
определяющие положение звеньев 2 и 3 в
зависимости от обобщённой координаты
![]() ,
а затем и координаты любых точек этих
звеньев.
,
а затем и координаты любых точек этих
звеньев.
В общем случае для многозвенной замкнутой кинематической цепи координаты точки Е можно определить из уравнения
![]() (2.14)
(2.14)
Лекция 7
План лекции
2.5.3 Определение положения точек в пространственных кинематических цепях.
2.5.4 Уравнения преобразования координат для кинематических пар.
2.5.5 Определение положения захвата пространственного манипулятора в неподвижной системе координат.
2.5.3 Определение положений точек звеньев в пространственных кинематических цепях.
Рассмотрим
два звена
и
.
С каждым из них свяжем свою систему
координат
![]() и
и
![]()
Движение звена относительно звена i можно разложить на переносное поступательное и относительное вращательное.
Переносное
поступательное движение характеризуется
параллельным переносом осей
координатной системы
![]() в новое
положение с осями
в новое
положение с осями
![]() и с координатами начала
и с координатами начала
![]() в системе
в системе
![]() .
.
О тносительное
вращательное движение характеризуется
поворотом осей системы
относительно
,
выраженное через углы Эйлера.
тносительное
вращательное движение характеризуется
поворотом осей системы
относительно
,
выраженное через углы Эйлера.
Рис. 2.13. Преобразование координатных систем.
2. 14 Преобразование координатных систем.
Выразим
координаты произвольной точки Е в
системе
![]() .
В соответствии с правилами аналитической
геометрии
.
В соответствии с правилами аналитической
геометрии
 (2.15)
(2.15)
Системе
(2.15)
при
добавлении тождества
![]() адекватно матричное уравнение вида
адекватно матричное уравнение вида
 (2.16)
(2.16)
или
![]()
Коэффициенты
![]() ,
входящие в выражение матрицы Mji
представляют собой направляющие косинусы
углов, образованных осями координат
системы Si
с осями системы
.
Выражения
для
приведены в справочниках по математике.
Для пространственной кинематической
цепи матрицы, определяющие вращение
звена j
относительно координатных осей X,
Y,
Z
и перемещение вдоль них,
имеют вид:
,
входящие в выражение матрицы Mji
представляют собой направляющие косинусы
углов, образованных осями координат
системы Si
с осями системы
.
Выражения
для
приведены в справочниках по математике.
Для пространственной кинематической
цепи матрицы, определяющие вращение
звена j
относительно координатных осей X,
Y,
Z
и перемещение вдоль них,
имеют вид:
 (2.17)
(2.17)
 (2.18)
(2.18)
 (2.19)
(2.19)
Из данных матриц можно определить матрицы конкретных кинематических пар. Для этого в выражения (2.17,2.18,2.19) необходимо подставить уравнения связи.