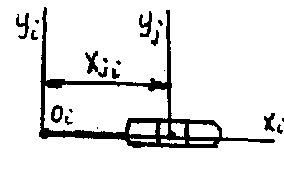
2.5 Метод преобразования координат.
Р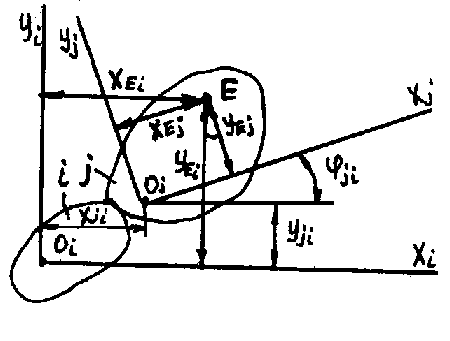 ассмотрим
движение в плоскости. Пусть имеются два
звена
ассмотрим
движение в плоскости. Пусть имеются два
звена
![]() и
и
![]() ,
с каждым из которых свяжем свою систему
координат
,
с каждым из которых свяжем свою систему
координат
![]() и
и
![]() .
Определим положение некоторой точки
Е с известными координатами
.
Определим положение некоторой точки
Е с известными координатами
![]() системы
системы
![]() в координатной
системе
в координатной
системе
![]() .
Это положение
описывается уравнениями преобразования
координат следующего вида:
.
Это положение
описывается уравнениями преобразования
координат следующего вида:
![]() (2.1)
(2.1)
Систему
уравнений (2.1) можно записать в матричной
форме, добавив тождество 1=1.
 (2.2)
(2.2)
или
![]()
Матрицы
![]() являются
столбцами, характеризуют положение
точки Е соответственно в системе
и
являются
столбцами, характеризуют положение
точки Е соответственно в системе
и
![]() .
Матрица
.
Матрица
![]() характеризует движение звена j
относительно
i.
При добавлении в эту матрицу уравнений
связи кинематической пары, являющихся
математическим выражением условий
связи, можно получить матрицу конкретной
кинематической пары.
характеризует движение звена j
относительно
i.
При добавлении в эту матрицу уравнений
связи кинематической пары, являющихся
математическим выражением условий
связи, можно получить матрицу конкретной
кинематической пары.
Для
вращательной и поступательной
кинематической пары 5 кл. матрицы
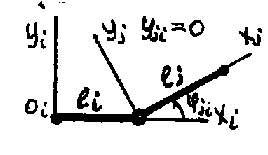
 имеют следующий вид:
имеют следующий вид:
![]()
![]()
2.5.1. Определение положений точек в незамкнутых кинематических цепях.
Эта задача имеет самостоятельное значение для исследования механизмов манипуляторов и, кроме того. её решение может быть использовано для определения положений точек звеньев любых механизмов о замкнутыми кинематическими цепями.
Рассмотрим произвольную плоскую незамкнутую цепь, имеющую „n" подвижных звеньев (рис. 2.11) соединенных кинематическими парами пятого класса.
С
неподвижным звеном и с каждым подвижным
свяжем свою систему координат
![]()
Известны
длины всех звеньев и координаты точки
![]() в системе
в системе
![]() ,
а также заданы обобщенные координаты
,
а также заданы обобщенные координаты
![]()
Т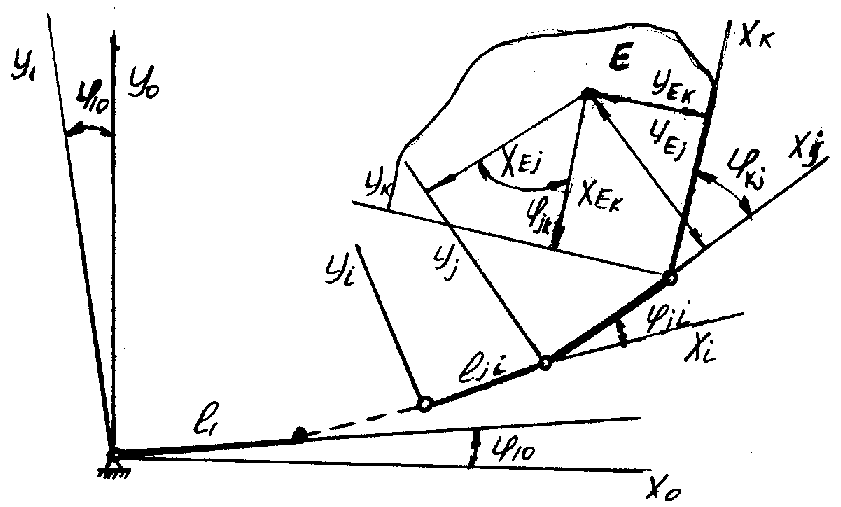 ребуется
определить положение точки E
в неподвижной системе координат
ребуется
определить положение точки E
в неподвижной системе координат
![]() ,
связанной со стойкой.
,
связанной со стойкой.
Рис. 2.11 Положение произвольной точки Е в незамкнутой кинематической цепи.
Для решения этой задачи произведем последовательный переход от координат точки Е в системе к её координатам в системе .
На
первом переходе определяем координаты
точки Е в системе
![]() .
.
Уравнения преобразования координат при этом переходе в матричной форме
или
![]() (2.3)
(2.3)
При втором переходе к системе
или (2.4)
Аналогично записываются уравнения преобразования
координат и на всех оставшихся переходах. Последний переход от системы S1 к. S0,
или
![]() (2.5)
(2.5)
Подставляя уравнение (2. 3 ) и ( 2.4) и далее в (2. 5) получим :
![]() (2.6)
(2.6)
Рассмотрим
схему механизма манипулятора» С
каждым звеном свяжем свою систему
координат. Известны геометрические
размеры звеньев механизма и определены:
обобщенные координаты:
![]() и координаты некоторой точки Е в системе
и координаты некоторой точки Е в системе
![]()
Т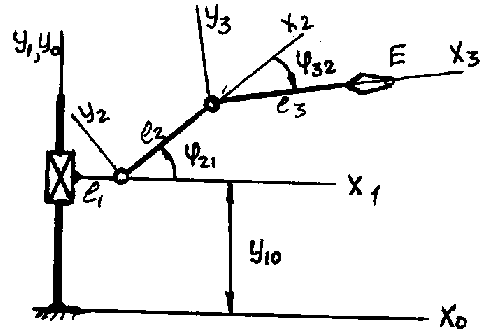 ребуется
определить положение
точки Е в
неподвижной системе координат
S0.
ребуется
определить положение
точки Е в
неподвижной системе координат
S0.
Для данной схемы в соответствии с формулой (2. 6)
![]()
Так
как
![]() и
и
![]()

 представим
представим

Полученные выражения могут быть использованы для составления алгоритма, блок-схема которого может быть построена по следующей схеме