

2.3.1 Построение планов скоростей.
Определяем
скорость точки А кривошипа по формуле
![]() ,
,
Здесь
![]() - длина кривошипа ОА
в М.
- длина кривошипа ОА
в М.
Назначаем
полюс плана скоростей РV
и из него перпендикулярно кривошипу
ОА откладываем отрезок PV
a (рис2.8),
представляющий
собой вектор скорости точки А при
масштабном коэффициенте плана скоростей![]() .
который
определяется выражением
.
который
определяется выражением
![]()
где
![]() -длина вектора в мм на плане скоростей.
-длина вектора в мм на плане скоростей.
Для определения скорости точки В движение шатуна разложим на переносное поступательное со скоростью точки А и относительное вращательное вокруг этой точки. Такое разложение движения описывается векторным уравнением.
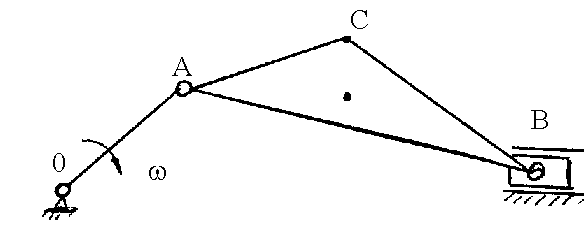
Р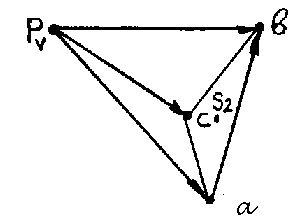 ис
2. 7
Схема кривошипно - ползунного механизма
ис
2. 7
Схема кривошипно - ползунного механизма
Р ис
2.
8 План
скоростей механизма
ис
2.
8 План
скоростей механизма
Рис 2. 9 План ускорений механизма
![]()
-
Величина
?
?
Направление
В
таблицу под уравнением внесены данные
о величине и направлении векторов.
Неизвестными
здесь являются величины векторов VB
и VBA
при известных их
направлениях. Такое
уравнение может быть решено графически
построением плана скоростей. Из полюса
PV
проводится направление вектора
![]() ,
а из конца вектора
скорости точки А - направление вектора
,
а из конца вектора
скорости точки А - направление вектора
![]() .
На пересечении
этих прямых находится конец вектора
скорости точки В (точка В плана скоростей).
.
На пересечении
этих прямых находится конец вектора
скорости точки В (точка В плана скоростей).
Теперь можно найти скорость любой другой точки. Например, для скорости точки С можно записать два векторных уравнения:
![]() ,
, ![]()
![]()
![]()
Проведя из точек а и в плана скоростей прямые, перпендикулярные отрезки АВ и ВС шатуна найдем конец вектора скорости точки С, начало его лежит в полюсе РV.
Величины скоростей точек А, В, С в м/с определяются выражениями:
![]()
Таким образом, если у звена известны величина и направление скорости одной точки и направление скорости (траектория) другой точки, то можно определить скорость любой его точки.
Свойства планов скоростей.
Началом векторов абсолютных скоростей является одна точка PV - полюс плана скоростей. Вытекает из определения.
2.
Отрезки,
соединяющие
концы векторов абсолютных скоростей,
при принятом масштабном коэффициенте
![]() представляют относительные скорости
точек.
представляют относительные скорости
точек.
Из
треугольника
![]() на плане скоростей имеем векторное
уравнение
на плане скоростей имеем векторное
уравнение
![]()
Подставив
сюда
![]() и
и
![]() ,
получим
,
получим
![]() или
или
![]() .
.
С другой стороны
Сравнивая
два последних уравнения, убеждаемся,
что
![]() ,
что и требовалось доказать.
,
что и требовалось доказать.
Зная относительную скорость каких либо двух точек звена, нетрудно определить его угловую скорость по величине и направлению. Например, величина угловой скорости шатуна равна
![]()
Для
определения направления угловой скорости
![]() показываем вектор
выходящим из точки В на звене 2,
которое совершает
относительное вращение вокруг точки
А. Он
показывает, что
в нашем примере
направлена против
часовой стрелки.
показываем вектор
выходящим из точки В на звене 2,
которое совершает
относительное вращение вокруг точки
А. Он
показывает, что
в нашем примере
направлена против
часовой стрелки.
3. Одноименные фигуры на звене и плане скоростей подобны, а одноименные отрезки пропорциональны и повернуты на 90° в сторону вращения звена.
В нашем примере соответственно перпендикулярны одноименные стороны треугольников АВС на шатуне и АВС на плане скоростей, следовательно, эти треугольники подобны.
Свойство
подобия одноименных фигур позволяет
определять скорости любых точек звена
не из уравнений, а
графически построением подобных
фигур. Так,
для определения
скорости точки С можно было не составлять
систему векторных уравнений,
а на стороне
ab
плана скоростей построить
![]() авс подобный
АВС на шатуне. Обвод
контуров одноименных фигур должен
быть в одинаковом направлении. Так,
если
АВС на звене отводится в порядке букв
по часовой стрелке, то
и
авс плана скоростей должен также читаться
по часовой стрелке.
авс подобный
АВС на шатуне. Обвод
контуров одноименных фигур должен
быть в одинаковом направлении. Так,
если
АВС на звене отводится в порядке букв
по часовой стрелке, то
и
авс плана скоростей должен также читаться
по часовой стрелке.
Проиллюстрируем применение свойства подобия одноименных фигур и пропорциональности одноименных отрезков на примере определения скорости точки S2 шатуна, расположенной внутри отрезка АВ. На плане скоростей она расположена также внутри отрезка ав и делит его в том же отношении, что и на звене, то есть
![]()
Скорость
точки
![]() равна
равна
![]()
4. Всем точкам, скорость которых равна 0, на плане скоростей отвечает одна точка-полюс PV. Так в полюсе можно проставить все неподвижные точки (например, точку 0), а также точки звеньев, совпадающие с их мгновенными центрами вращения.