

11.7. Логометры
Отклонение подвижной части у большинства электроизмерительных механизмов зависит от значений токов в их катушках. Но в тех случаях, когда механизм должен служить для измерения величины, не являющейся прямой функцией тока (сопротивления, индуктивности, емкости, сдвига фаз, частоты и т.д.), необходимо сделать результирующий вращающий момент зависящим от измеряемой величины и не зависящим от напряжения источника питания.
Для таких измерений применяют механизм, отклонение подвижной части которого определяется только отношением токов в двух его катушках и не зависит от их значений. Приборы, построенные по этому общему принципу, называются логометрами (по-гречески «логос» — отношение). Возможно построение логометрического механизма любой электроизмерительной системы с характерной особенностью — отсутствием механического противодействующего момента, создаваемого закручиванием пружин или растяжек.
Рис. 11.15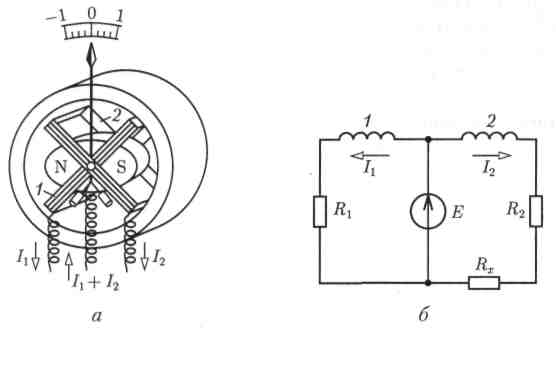
Токи в эти катушки подводятся через три мягкие серебряные спирали, не создающие при закручивании механического момента (одна из спиралей — общая для цепей токов обеих катушек). Если подвижная часть прибора достаточно хорошо уравновешена, то при отсутствии токов она находится в состоянии безразличного равновесия — стрелка указателя может быть на любом делении шкалы прибора.
Если в цепях обеих катушек есть постоянные токи 11 и 12, то на подвижную часть действуют в противоположных направлениях два вращающих момента, создаваемых взаимодействием поля постоянного магнита с индукциями В1 и В2 и токов в катушках [см. (11.2)]:
Мвр1 = w1.SB I1; Mвp2 = w2SB2I2, (11.7)
где w1 и w2 — числа витков катушек; S — их одинаковая площадь поперечного сечения.
Предположим, что Мвр1 > Мвр2. Под действием большего вращающего момента подвижная часть поворачивается. При этом первая катушка, на которую действует больший вращающий момент, перемещается в область слабого магнитного поля (с меньшим значением индукции В1 из-за большего воздушного зазора). Одновременно вторая катушка, на которую действует меньший вращающий момент, перемещается в область более сильного магнитного поля (воздушным зазор в магнитопроводе меньше). Таким образом, по мере поворота подвижной части больший вращающий момент убывает, а меньший возрастает. Следовательно, при некотором определенном положении подвижной части должно установиться равновесие моментов: Мвр1 = Мвр2.
На схеме (рис. 11.15, б) показано включение логометра для измерения сопротивлений. Здесь Е — ЭДС источника; R1 — постоянное сопротивление цепи первой катушки; R2 — постоянная часть сопротивления цепи второй катушки; Rx — сопротивление измеряемого объекта, находящегося вне прибора. При токах в катушках
I1 =E/R1; I2 = E/(R1 + Rx)
и равенстве вращающих моментов из (11.7) имеем
w1B1/R1 = w2B2 /(R1 + Rx),
откуда
Rx = R1(w2/w1)(B2/B1) - R2
Отношение В2/В1 зависит от конструкции магнитной цепи прибора и угла — положения подвижной части. Следовательно, каждому значению измеряемого сопротивления Rx соответствует определенное положение подвижной части логометра, которое не зависит от ЭДС Е.
В действительности на подвижную часть в состоянии равновесия действует некоторый механический момент из-за неполной уравновешенности подвижной части при закручивании токопроводящих спиралек. Вследствие наличия этого момента показания логометра зависят от ЭДС источника тем больше, чем меньше ЭДС.
Независимость положения подвижной части логометра от значения ЭДС используется в мегаомметрах, предназначенных для измерения больших сопротивлений (до 1014 Ом) при высоком напряжении (до 2500 В), например сопротивления изоляции. В качестве источника в мегомметрах применяются небольшие магнитоэлектрические генераторы постоянного тока с ручным приводом.
В частотомерах катушки логометра включаются в цепь синусоидального тока через выпрямители и элементы, сопротивления которых зависят от частоты.
В ряде случаев нежелательно безразличное положение подвижной части логометра, так как это может привести к ложному отсчету показания прибора при выключенном источнике питания. Чтобы предупредить подобный ложный отсчет, конструкцией логометра предусматривается отклонение стрелки за пределы шкалы, например действием небольшого механического момента, создаваемого неполной уравновешенностью подвижной части.