

7.1.12. Рабочие характеристики асинхронного двигателя
Механическая характеристика наглядно показывает свойства
асинхронного двигателя как части
электропривода. Но для более полного
выявления свойств самого двигателя
служат его рабочие характеристики —
так принято называть зависимости от
полезной мощности Р2
двигателя на валу частоты вращения
п, вращающего момента Мвр,
коэффициента мощности cosφ1
и КПД
![]() .Все рабочие характеристики снимаются
при номинальных частоте сети f
и напряжении между выводами статора
U1 =Ulном.
.Все рабочие характеристики снимаются
при номинальных частоте сети f
и напряжении между выводами статора
U1 =Ulном.
Так как Р2 Рмех, а Рмех = Мврωр, то зависимость п(Р2) — скоростная характеристика — мало отличается по форме от механической характеристики двигателя п(Мвр). Она тоже может быть названа жесткой (рис. 7.20), при этом скольжение s(Р2) = (пх — п)/пх.
Вращающий момент Мвр, развиваемый двигателем, складывается из полезного момента М2, (преодоления нагрузки на валу двигателя) и момента холостого хода Мх. Последний покрывает механические потери двигателя.
Рис. 7.20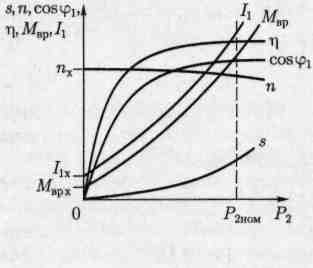
Этот момент можно приближенно считать не зависящим от нагрузки двигателя. Полезный момент М2 = Р2/ωр; если бы скорость ωр была строго постоянна, то зависимость М2(Р2) была бы линейна, но скорость двигателя немного уменьшается с увеличением Р2, поэтому график зависимости М2(Р2) немного отклоняется вверх. Соответственно график вращающего момента Мвр(Р2), складывающегося из момента холостого хода и полезного момента, пересекает ось ординат в точке, соответствующей Мх, а затем он почти прямолинеен и лишь немного изгибается вверх. Аналогична зависимость I1(Р2).
Что касается зависимости соsφ1 двигателя от нагрузки, то его изменения обусловлены следующими соотношениями. Намагничивающий ток двигателя мало зависит от нагрузки, так как ее увеличение вызывает лишь возрастание потокосцеплений рассеяния, пропорциональных токам в обмотках статора и ротора, а главный магнитный поток машины при возрастании нагрузки незначительно уменьшается.
Но активный ток двигателя пропорционален его механической нагрузке. Таким образом, с увеличением нагрузки двигателя относительное значение реактивного тока быстро убывает и cosφ1 увеличивается. При холостом ходе двигателя его коэффициент мощности довольно низок — примерно 0,2. С увеличением нагрузки он быстро возрастает и достигает максимального значения (0,8 — 0,95) при нагрузке, близкой к номинальной. Таким образом, даже у полностью загруженного двигателя реактивный ток составляет (60 — 30)% тока статора.
Неполная загруженность асинхронных двигателей — это одна из главных причин низкого соsφ промышленных предприятий. Естественным способом повышения cosφ является полная загрузка асинхронных двигателей. Главный магнитный поток двигателя пропорционален напряжению питающей сети [см. (7.4,б]. Намагничивающий ток, возбуждающий этот поток, при заданном значении потока обратно пропорционален магнитному сопротивлению на пути потока. В этом магнитном сопротивлении большую часть составляет сопротивление воздушного зазора между статором и ротором. По этой причине конструктор стремится уменьшить этот зазор до минимума, определяемого условиями подвижности в подшипниках и необходимым запасом на их износ, прогибом вала и точностью центровки. С увеличением номинальной мощности двигателя необходимый воздушный зазор возрастает значительно медленнее этой мощности, благодаря чему с повышением номинальной мощности двигателя его cosφ1 увеличивается. С уменьшением номинальной частоты вращения двигателя увеличивается его магнитный поток, так как при меньшей частоте вращения он индуктирует в фазной обмотке статора меньшую ЭДС. Следовательно, у тихоходных двигателей намагничивающий ток относительно больше, а cosφ1 существенно меньше.
Коэффициент полезного действия определяется отношением полезной мощности на валу Р2 к мощности Р1 определяющей потребление двигателем энергии из сети:
Мощность Р1 равна сумме полезной мощности и мощности всех потерь в двигателе:
Р1 = Р2 + Рпот
Мощность всех потерь в двигателе можно разделить на постоянную составляющую, практически не зависящую от нагрузки, и переменную составляющую, зависящую от нее.
Мощностью постоянных потерь в двигателе можно считать мощность потерь в сердечнике статора из-за гистерезиса и вихревых токов и мощность механических потерь, которая определяется экспериментально из опыта холостого хода двигателя.
Мощность переменных потерь в двигателе равна мощности потерь на нагревание проводов обмоток статора и ротора:
![]() ,
,
![]() .
.
Максимального значения (65 — 95 %) КПД достигает, если переменные потери равны постоянным. У большинства двигателей этот максимум КПД имеет место примерно при нагрузке, равной 75 % номинальной, так как двигатели проектируются с учетом того обстоятельства, что далеко не всегда они полностью загружены.