

7.1.7 Схема замещения фазы асинхронного двигателя
Для расчетов рабочих процессов асинхронного двигателя часто выбирается схема замещения фазы двигателя, состоящая из резистивных и индуктивных элементов с постоянными параметрами, а также резистивного элемента с переменным сопротивлением, замещающим механическую нагрузку на валу двигателя.
Сложность получения такой схемы замещения заключается в том, что, во-первых, неодинаковы частоты токов фаз статора f и ротора f2 = fs, во-вторых, различны числа витков фазных обмоток статора w1 и ротора w2 и их обмоточные коэффициенты kоб1 и коб2, и в-третьих, различны числа фаз статора m1 = 3 и короткозамкнутого ротора т2 = N. Поэтому необходимо все параметры и величины, характеризующие режим фазы ротора, привести к частоте, числу витков, обмоточному коэффициенту и числу фаз статора.
Приведем сначала эти величины к частоте фазы статора. Введем в рассмотрение эквивалентный неподвижный ротор таким образом, чтобы вращающееся магнитное поле двигателя осталось неизменным, соответствующим его рабочему режиму. Неизменность вращающегося магнитного поля означает постоянство энергии, передаваемой от статора к вращающемуся ротору в рабочем режиме или к эквивалентному неподвижному ротору.
Ввиду постоянства вращающегося магнитного поля действующее значение ЭДС в фазной обмотке эквивалентного неподвижного ротора определяется по той же формуле, что и действующее значение ЭДС в фазной обмотке статора в рабочем режиме [см. (7.4,б)], так что с учетом (7.7)
Е2н = 4,44fw2kоб2Фв = E2/s, (7.10)
где для короткозамкнутого ротора w2 = 1/2, ko62 = 1.
Величина Е2н называется ЭДС фазы ротора, приведенной к частоте статора. Заметим, что Е2н является одной из важных расчетных величин для асинхронного двигателя, а ее значение примерно вдвое больше действующего значения ЭДС Е2, индуктируемой фактически в фазной обмотке заторможенного ротора. Это объясняется тем, что во втором случае увеличивается примерно в 6,5 раза ток в фазной обмотке статора относительно номинального значения, вследствие чего увеличивается падение напряжения Zоб1I1 на ней и уменьшается намагничивающий ток, возбуждающий вращающееся магнитное поле.
Чтобы вращающееся магнитное поле осталось неизменным при замене вращающегося ротора эквивалентным неподвижным ротором, необходимо, чтобы токи в фазах, имеющие в первом случае частоту f2 = fs, а во втором — f, были одинаковы по амплитуде и сдвигу фаз относительно возбуждающих токи ЭДС. Это достигается приведением тока фазы вращающегося ротора к частоте f тока неподвижного статора. Ток фазы вращающегося ротора со схемой замещения по рис. 7.11, учитывая (7.10), можно выразить следующим образом:
 .
.
Правой части этого равенства соответствует схема замещения фазы эквивалентного неподвижного ротора (рис. 7.13), частота тока в которой равна f, а величина Rв2/s представлена суммой активного сопротивления фазной обмотки ротора Rв2 и некоторого добавочного активного сопротивления R2(s), во много раз большего, чем Rв2.
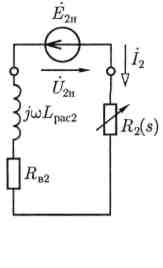
Рис.
7.13
ЭДС на одинаковый угол

Таким образом, работающий асинхронный двигатель для расчетов может быть заменен эквивалентным неподвижным, в котором цепь каждой фазной обмотки ротора замкнута резистором с сопротивлением
R2(s) = Rв2(1-s)/s
Мощность этого резистора
![]() равна
развиваемой механической мощности
одной фазы ротора.
равна
развиваемой механической мощности
одной фазы ротора.
Приведем теперь все величины, характеризующие фазу эквивалентного ротора, к числу витков, обмоточному коэффициенту и числу фаз статора подобно тому, как приводились к числу витков первичной обмотки трансформатора величины, относящиеся к его вторичной обмотке (см. 6.2.5).
Электродвижущая сила фазы статора Е1 связана с ЭДС фазы неподвижного эквивалентного ротора Е2н соотношением
Е1 = (wlkоб1/(w2koб2)E2н = кеЕ2н,
где ке — коэффициент трансформации напряжений асинхронного двигателя.
Как следует из схемы замещения фазы эквивалентного ротора (рис. 7.13),

Следовательно,
![]()
Ток фазы ротора I2 можно заменить приведенным током по (7.9):
![]()
где ki — коэффициент трансформации токов асинхронного двигателя.
Сделав подстановку, получим
![]()
Произведение k = keki — это коэффициент трансформации асинхронного двигателя.
Введем теперь в уравнения электрического состояния фазы статора асинхронного двигателя приведенные сопротивления цепи эквивалентного ротора:
![]() и
и
![]() (7.11)
(7.11)
Элементы с такими сопротивлениями в цепи фазы статора будут потреблять такую же энергию и при том же сдвиге фаз между напряжением и током, как это имеет место в соответствующих сопротивлениях элементов цепи фазы ротора (см. рис. 7.13).
Таким образом, ЭДС фазы статора
![]()
а напряжение статора (фазное)
![]() (7.12,а)
(7.12,а)
С другой стороны, ЭДС
![]() пропорциональна намагничивающему
току I1х и
по тем же соображениям, как и для
трансформатора,
пропорциональна намагничивающему
току I1х и
по тем же соображениям, как и для
трансформатора,
![]()
где условная величина
![]() ,
модуль которой имеет размерности
сопротивления, в схеме замещения
соответствует магнитной цепи двигателя.
Следовательно, для напряжения фазы
статора справедливо также уравнение
,
модуль которой имеет размерности
сопротивления, в схеме замещения
соответствует магнитной цепи двигателя.
Следовательно, для напряжения фазы
статора справедливо также уравнение
![]() (7.12,б)
(7.12,б)
Вместе с уравнением тока статора
![]() (7.13)
(7.13)
два уравнения напряжения фазы статора
(7.12) можно рассматривать как уравнения,
соответствующие законам Кирхгофа для
цепи со схемой замещения по рис. 7.14,а.
В ней элементы
![]() изображают схему замещения обмотки
фазы статора,
изображают схему замещения обмотки
фазы статора,
![]() —
обмотки фазы ротора, Z12
— магнитную цепь машины, a
R'2 =
R'в2(1
— s)/s
— механическую нагрузку.
—
обмотки фазы ротора, Z12
— магнитную цепь машины, a
R'2 =
R'в2(1
— s)/s
— механическую нагрузку.
При синхронной частоте вращения (s = 0) сопротивление резистивного элемента, соответствующего механической нагрузке в эквивалентной схеме замещения,
R'2 = R'в2/s - R'в2 = R'в2(1 - s)/s = ∞.
Если затормозить двигатель до полной остановки (s = 1), то R'2 = 0.
По этой причине опыт полной остановки двигателя именуется опытом короткого замыкания — обычно он осуществляется при сильно пониженном напряжении на статоре.
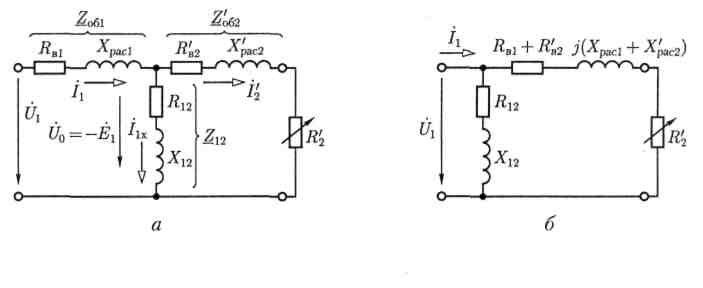
Рис. 7.14
На рис. 7.14, б изображена упрощенная Г-образная схема замещения одной фазы асинхронной машины, составленная в предположении, что
U0
![]() U1
U1