

7.1.5 Уравнение электрического состояния фазы ротора
асинхронного двигателя
Вращающееся магнитное поле индуктирует в фазной обмотке ротора ЭДС е2 с частотой f2 = р(n1 — n)/60. Чтобы выразить эту частоту через частоту питающей сети f, разделим и умножим правую часть этой формулы на n1 и, учитывая (7.1) и n1=60f/p, получим частоту
f2 =fs, (7.5)
называемую частотой скольжения, равной частоте сети, умноженной на скольжение.
Электродвижущая сила е1 в фазной обмотке статора и ЭДС е2 в фазной обмотке ротора индуктируются общим для этих обмоток вращающимся магнитным полем двигателя, создаваемым совместным действием МДС токов статора и ротора. Однако ЭДС е1 препятствует изменению тока i1 в фазной обмотке статора, а ЭДС е2 возбуждает ток i2 в фазной обмотке ротора. Поэтому если положительные направления ЭДС е1 и тока i1 в фазной обмотке статора выбирают совпадающими (см. рис. 7.9), то в фазной обмотке ротора положительное направление тока i2 обычно выбирают противоположным направлению ЭДС е2. Это соответствует встречному включению фазных обмоток статора и ротора, при котором результирующая МДС двигателя равна разности МДС токов статора и ротора. Аналогичные соотношения между ЭДС, токами и МДС были ранее получены для первичной и вторичной обмоток трансформатора (см. рис. 6.11, б).
Ток i2 фазной обмотки ротора создает магнитное поле, часть магнитных линий которого замыкается помимо обмотки статора. Совокупность этих магнитных линий определяет потокосцепление рассеяния Ψрас2 фазной обмотки ротора.
Запишем в комплексной форме уравнение электрического состояния фазы ротора с учетом противоположных положительных направлений ЭДС и тока:
![]() ,
(7.6)
,
(7.6)
где—![]() активное сопротивление витков ротора;
Lрас2 =
Ψрас2/i2—
— индуктивность рассеяния; sωLpac2
— индуктивное сопротивление рассеяния
фазной обмотки ротора.
активное сопротивление витков ротора;
Lрас2 =
Ψрас2/i2—
— индуктивность рассеяния; sωLpac2
— индуктивное сопротивление рассеяния
фазной обмотки ротора.
Действующее значение ЭДС фазы ротора определим по аналогии с (7.4,б):
Е2 = 4,44fsω2kоб2Фв, (7.7)
где для короткозамкнутого ротора w2 = 1/2 и коб2 = 1.
Уравнению (7.6) соответствуют схема замещения фазной обмотки ротора на рис. 7.11 и векторная диаграмма на рис. 7.12.
Рис. 7.12
Рис. 7.11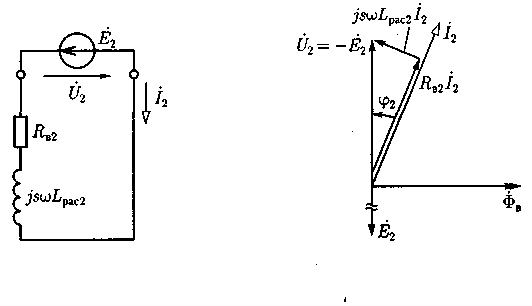
Заметим, что уравнение электрического состояния фазы ротора (7.6) аналогично уравнению электрического состояния вторичной цепи трансформатора (6.15,б) в режиме короткого замыкания, т.е. при U2 = 0.
7.1.6 Баланс магнитодвижущих сил в асинхронном двигателе
Вращающиеся магнитные поля токов статора и ротора, как было показано, неподвижны относительно друг друга. На этом основании при вращении ротора МДС токов статора и ротора можно рассматривать как векторы, геометрическая сумма которых определяет МДС, возбуждающую вращающееся магнитное поле двигателя. При расчете этих МДС необходимо учитывать то обстоятельство, что они создаются токами в обмотках, секции которых распределены по нескольким пазам, вследствие чего магнитные поля токов отдельных секций обмоток не совпадают в пространстве. Чтобы учесть это, можно ввести в выражения МДС коэффициент, меньший единицы и приближенно равный обмоточному коэффициенту.
Следовательно, по аналогии с балансом МДС в трансформаторе [см. (6.2.4)] в асинхронном двигателе как при неподвижном, так и при вращающемся роторе справедливо условие
 (7.8)
(7.8)
Здесь учтено, что результирующие МДС трехфазной и т2-фазной обмоток статора и ротора соответственно в 3/2 раза и т2/2 раз больше МДС одной фазы.
Из последнего уравнения можно выразить ток статора следующим образом:
 (7.9)
(7.9)
Величина

называется приведенным током ротора; это та часть тока статора, которая уравновешивает размагничивающее действие тока ротора. Ток намагничивания I1х в рабочем режиме двигателя (s ≤ sH0M) практически равен току статора при идеальном холостом ходе двигателя. Чтобы определить последний из опыта, необходимо сообщить ротору с помощью вспомогательного двигателя синхронную частоту вращения, т. е. равную частоте вращения магнитного поля (s = 0), при которой ток в роторе станет равным нулю. Таким образом, ток холостого хода двигателя при отсутствии нагрузки на валу больше тока идеального холостого хода вследствие потерь энергии на преодоление трения в подвижных частях, на нагревание обмоток ротора и т. п.