

20. Диаграмма переходов для машинного цикла мп 8080а. Формирование сис-темных управляющих сигналов.
Число базо¬вых команд МП составляет 78, время выполнения команд для тактовой частоты F=2 МГц лежит в диапазоне 2-9 мкс. Команды МП могут быть одно-, двух- и трехбайт¬ными. Первый байт - код операции. Двух- и трехбайтные команды хранятся в сосед¬них ячейках памяти.
МП имеет четыре режима адре¬сации:
1. Прямая адресация. В этом режиме второй и третий байты команды содержат адрес операнда, причем во втором байте находятся младшие разряды адреса, а в треть-ем - старшие.
2. Регистровая адресация – команда определяет регистр или регистровую пару, в которой находится операнд.
3. Косвенная регистровая адресация – команда определяет регистровую пару, в которой содержится адрес операнда в памяти, причем младшие разряды адреса хранят-ся во втором (младшем) регистре пары, а старшие – в первом (старшем) регистре пары.
4. Непосредственная адресация - команда содержится в себе 8- или 16-разрядный операнд.
Первый байт команды, выбранный из программной памяти, передается по внут-ренней шине данных в РК. Выход РК связан с дешифратором команд ДШК, который определяет тип выполняемой операции. Реализация лю¬бой команды складывается из машинных циклов. Для выборки и выполнения команды может потребоваться от одно-го до пяти машинных циклов. Машинные циклы называются М1, М2, М3, М4 и М5. Длительность машинного цикла варьируется от трёх до пяти тактов или состояний. Такты обозначаются как Т1, Т2, Т3, Т4 и Т5. Длительность каждого такта составляет один период тактового генератора. Имеется три других состояния, которые могут длиться от одного до произвольного числа периодов тактового генератора: это состоя-ния ожидания, захвата и ожида¬ния при останове, управляемые внешними сигналами.
Начало каж¬дого машинного цикла определяется синхросигналом SYNC. Мини-мальная длительность одного состояния Т равняется 0,5 мкс для Fmax=2 МГц.
Машинный цикл М1 всегда является циклом выборки кода операции и продолжается четыре или пять периодов тактового генератора. Машинные циклы М2, М3, М4 и М5 обычно продолжаются три такта.
Диаграмма переходов при выполнении машинного цик¬ла в МП Intel 8080A пред-ставлена на рис. 2, на котором используются следующие обозначения TW - состояние ожидания МП; TWH - состояние ожидания МП при выпол¬нении команды останова HLT; Тi - состояние МП, i = 1 - 5.
Такт Т1 идентифицируется синхросигналом SYNC. В течение Т1 на шину адре-са выставляется содержимое счётчика команд, а на шине данных появляется слово со-стояния, определяющее тип выполняемого машинного цикла.
После Т1 всегда следует другое состояние Т2. В состоянии Т2 МП анализирует признак подтвержде¬ния останова HLТА и сигнал готовности READY и соот-ветственно переходит в состояние ТWH или ТW. Если имел место сигнал захвата HOLD, то внутренний триггер захвата устанавливается в состояние 1.
В состоянии Т3 действия определяются типом машинного цикла. В цикле выбор-ки МП интерпретирует код на шине данных как байт КОП, а в циклах чтения из памя-ти, записи в память, ввода и вывода информации осуществля¬ет обмен данными.
Состояния Т4 и Т5 являются необязательными, так как используются для внут-ренних преобразований в МП. Та¬ким образом, МП может переходить в состояние Т1 следующего машинного цикла после Т3, Т4 или Т5.
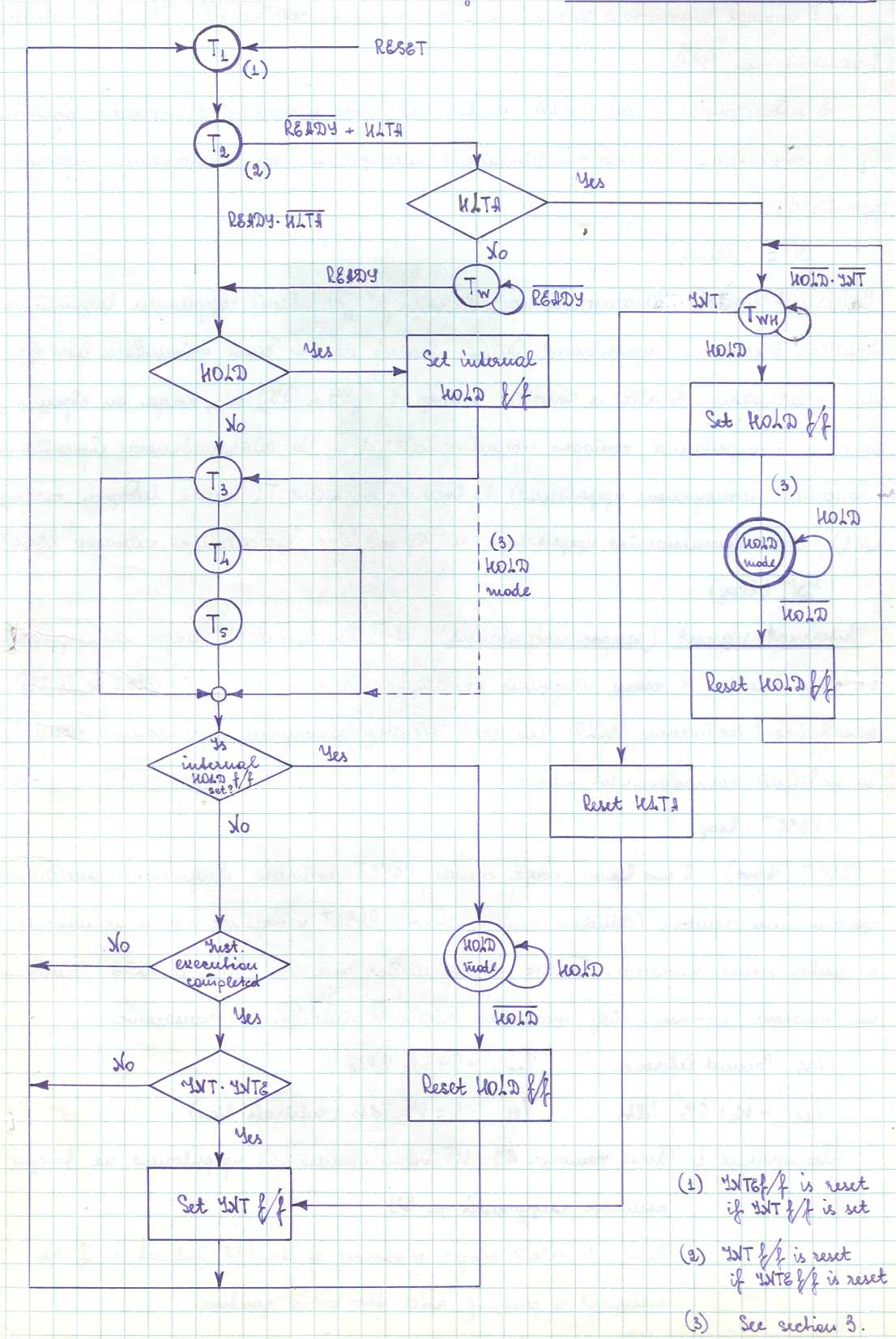
 Рис.
2. Диаграмма переходов при выполнении
машинного цикла
Рис.
2. Диаграмма переходов при выполнении
машинного цикла
В МП Intel 8080A имеется десять типов машинных циклов, которые могут быть при выполнении команды: выборка байта команды, чтение из памяти, запись в память, чтение из стека, запись в стек, ввод, вывод, обработка прерывания, останов, обработка прерыва¬ния при останове. При этом первым машинным циклом всегда является выборка кода операции. Для определения типа машинного цикла в первом состоянии Т1 каждого машинного цикла на шину данных передается 8-разрядный код – слово состояния МП, который запоминается во внешнем регистре-фиксаторе и используется, для формирования системных управляющих сигналов для об¬ращения к памяти, периферийным устройствам. Назначение каждого разряда в слове состояния приведено в таблице 1.
Разряд |
Имя |
Определение |
D0 |
INTA |
признак подтверждения прерывания; используется для считывания в РК команды вызова подпрограммы обработки прерывания RST n |
D1 |
-WO |
признак записи-вывода; указывает, что в текущем машинном цикле будет выполняться запись в память или в порт вывода (при -WO = 0) |
D2 |
STACK |
признак указывает, что на АШ будет установлен адрес стека из указателя стека |
D3 |
HLTA |
признак подтверждает выполнение команды останова HLT |
D4 |
OUT |
признак вывода; указывает, что АШ содержит адрес порта вывода, а шина данных будет содержать данные при -WR = 0 |
D5 |
М1 |
признак указывает, что МП находится в цикле выборки первого байта команды |
D6 |
INP |
признак ввода; указывает, что АШ содержит адрес порта ввода, и входные данные должны быть по шине данных при DBIN = 1 |
D7 |
MEMR |
признак чтения; указывает, что ШД будет использована для чтения данных из памяти |
Таблица 1
Разряд Имя Определение
D0 INTA признак подтверждения прерывания; ис¬пользуется для считывания в РК команды вызова подпрограммы обработки прерывания RST n
D1 -WO признак записи-вывода; указывает, что в текущем машинном цикле будет выпол-няться запись в память или в порт вывода (при -WO = 0)
D2 STACK признак указывает, что на АШ будет установлен адрес стека из указателя стека
D3 HLTA признак подтверждает выполнение коман¬ды останова HLT
D4 OUT признак вывода; указывает, что АШ содержит адрес порта вывода, а шина данных будет содержать данные при -WR = 0
D5 М1 признак указывает, что МП находится в цикле выборки первого байта команды
D6 INP признак ввода; указывает, что АШ содержит адрес порта ввода, и входные данные должны быть по шине данных при DBIN = 1
D7 MEMR признак чтения; указывает, что ШД будет использована для чтения данных из па-мяти
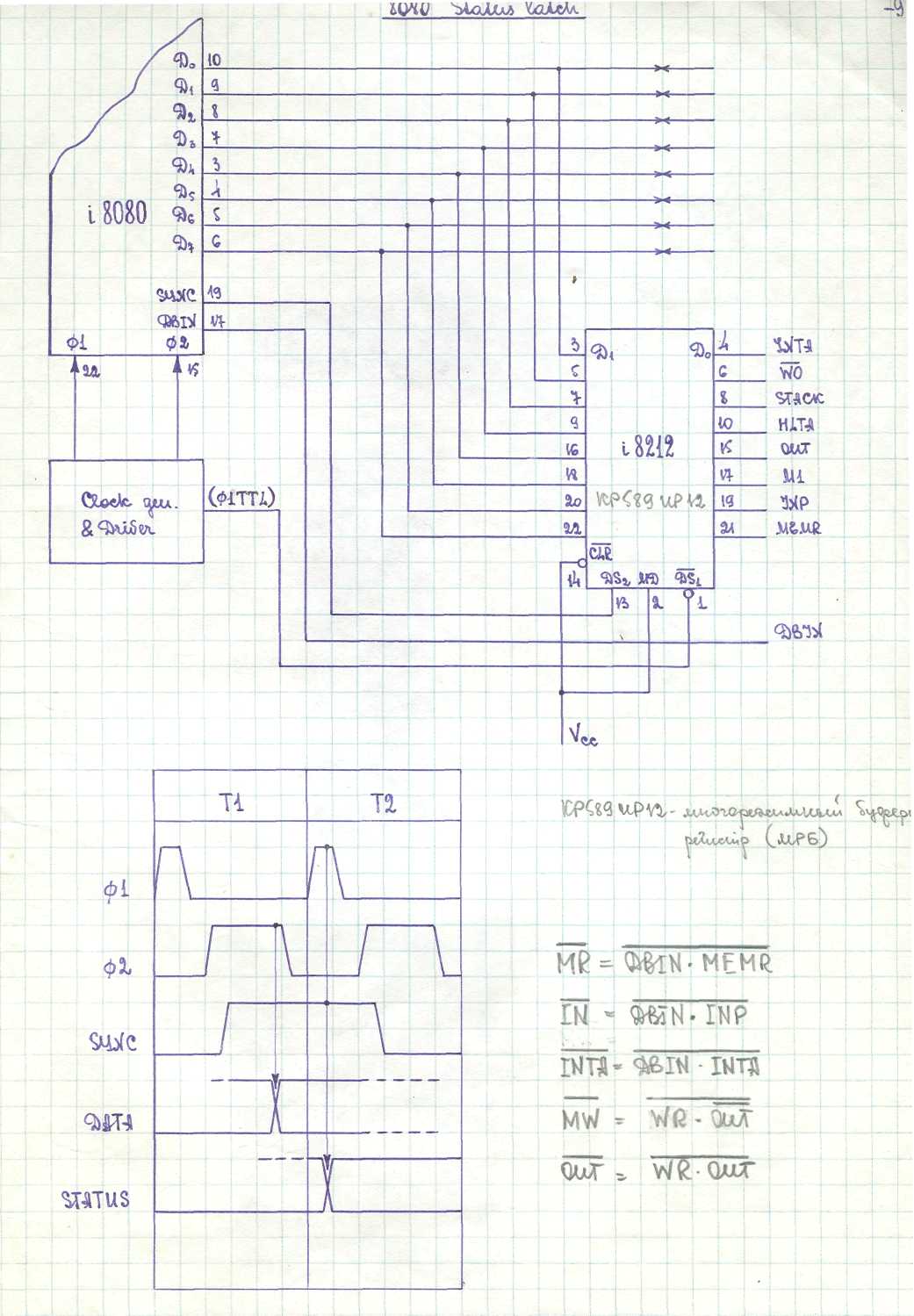
Формирование системных управляющих сигналов.
На¬бор управляющих сигналов, таких как, чтение из памяти (-MR), запись в па-мять (-MW), ввод информации(-IN),вывод информации (-OUT), подтверждение преры-вания -INTA обеспечивает прием и передачу кодов между МП, памятью и периферий-ными устройствами в определенные интервалы времени в соответствии с диаг¬раммой переходов машинного цикла. Данные сигналы не¬посредственно не формируются мик-ропроцессором, для их формирования используются сигналы приёма (DBIN) и записи (-WR) из МП и необходимые признаки из слова состояния:
- МR
=-(DВIN&
MR);
МR
=-(DВIN&
MR);
-IN= -(DВIN&INP);
-INTА = -(DВIN&INTA);
-MW = -(-WR&-OUT);
-OUT=-(-WR&ОUT);¬
Слово состояния загружается в 8-разрядный регистр-фиксатор, на¬пример, 8228, посредством сигнала синхронизации SYNC и тактирующего сигнала Φ2 уровня ТТЛ, формиру¬емого генератором тактовых сигналов, в начале такта Т2.
На рис. 3 показано формирование системных управ¬ляющих сигналов в соответствии с вышеприведёнными вы¬ражениями. Другие признаки слова состояния могут ис¬пользоваться при тестировании МП.
 Остановимся
несколько подробнее на обработке
запросов прерывания. Устройст-во,
обслуживаемое МП в режиме прерывания,
инициирует прерывание путем формирования
на входе INT МП сигнала прерывания, который
может возникнуть в любом машинном цикле
команды. Однако, как видно из диаграм¬мы
переходов, текущая команда должна
завершиться, и только после этого МП
переходит к машинному циклу под¬тверждения
прерывания, который имеет ряд отличий
от цикла выборки команды.
Остановимся
несколько подробнее на обработке
запросов прерывания. Устройст-во,
обслуживаемое МП в режиме прерывания,
инициирует прерывание путем формирования
на входе INT МП сигнала прерывания, который
может возникнуть в любом машинном цикле
команды. Однако, как видно из диаграм¬мы
переходов, текущая команда должна
завершиться, и только после этого МП
переходит к машинному циклу под¬тверждения
прерывания, который имеет ряд отличий
от цикла выборки команды.
Во-первых, в слове состояния дополнительно к признаку машинного цикла вы-борки команды M1 содержится признак INTA, подтверждающий, что сигнал прерыва-ния воспринят МП.
Bo-вторых, СК не увеличивается на 1 в данном цикле, так как, увеличенный после выборки предыдущей команды, он должен быть за¬помнен в стековой памяти без изменения.
В-третьих, вместо команды из программной памяти на шину данных передается код, представляющий собой однобайтную команду RST n, n=0-7.
Команда RST n обеспечивает запоминание со¬держимого программного счетчика в стеке, и в СК форми¬руется один из восьми начальных адресов, в которых х¬ранятся первые команды подпрограмм обслуживания прерываний. Если область памяти в 8 байт недостаточна для размещения подпрограммы, что, как правило, имеет место, то путем использования команд перехода ее можно расширить. Таким образом, первые 64 ячейки памяти (0000Н – 003FH) зарезервированы для подпрограмм об¬работки преры-ваний