

7.Проецирование. Виды проекций. Перспективная проекция.
П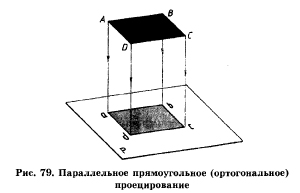 роецирование
—
процесс получения изображения предмета
на
плоскости
(плоскостях).Рассмотрим
сущность проецирования на примере
получения изображения объекта на одну
плоскость. Для этого выберем плоскость,
которую назовем плоскостью проекций.
Перед ней поместим любой объект, например,
прямую АВ. Перед прямой расположим центр
проецирования, из которого направим к
плоскости проекций проецирующие лучи
через все точки прямой АВ до пересечения
их с плоскостью проекций. На плоскости
проекций получим изображение совокупности
точек, которое будет являться проекцией
данной прямой АВ (рис. 77).
Таким
образом,
проекция
—
это изображение объекта, полученное
при проецировании его на плоскость
проекций.
роецирование
—
процесс получения изображения предмета
на
плоскости
(плоскостях).Рассмотрим
сущность проецирования на примере
получения изображения объекта на одну
плоскость. Для этого выберем плоскость,
которую назовем плоскостью проекций.
Перед ней поместим любой объект, например,
прямую АВ. Перед прямой расположим центр
проецирования, из которого направим к
плоскости проекций проецирующие лучи
через все точки прямой АВ до пересечения
их с плоскостью проекций. На плоскости
проекций получим изображение совокупности
точек, которое будет являться проекцией
данной прямой АВ (рис. 77).
Таким
образом,
проекция
—
это изображение объекта, полученное
при проецировании его на плоскость
проекций.
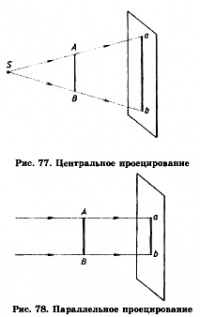
Проекцию обозначают малыми буквами латинского алфавита (а, б). Различают центральное (рис. 77) и параллельное проецирование (рис. 78). При центральном проецировании проецирующие лучи исходят из одной точки — центра проецирования. При параллельном проецировании все проецирующие лучи параллельны между собой, поскольку центр проецирования удален в бесконечность. Метод центрального проецирования используется в архитектуре, строительстве, а также в академическом рисовании. В науке, технике, производстве применяют параллельные проекции, так как они достаточно наглядны и выполнять их проще, чем центральные.
Параллельное проецирование подразделяется на прямоугольное (рис. 79) и косоугольное При прямоугольном (ортогональном) проецировании проецирующие лучи падают на плоскость под прямым углом (рис. 79). При косоугольном проецировании проецирующие лучи падают на плоскость под углом, отличным от прямого.
Перспективная (центральная) проекция – проекция каждой точки объекта лежит на луче, проложенном от центра проекции до соответствующей точки объекта.
Параллельная проекция – проекция каждой точки объекта лежит на прямой параллельной проекционному лучу.
8.Удаления невидимых линий и поверхностей. Алгоритм Ньюэлла-Ньюэлла-Санча.
Удаления невидимых линий и поверхностей:
Задача удаления невидимых линий и поверхностей является одной из наиболее сложных задач в компьютерной графике. Для решения данной задачи были разработаны специальные алгоритмы, целью которых является удаление тех линий ребер, поверхностей, граней или объемов, которые невидны наблюдателю. Идея алгоритмов удаления невидимых линий и поверхностей заключается в следующем: чем дальше расположен объект от точки наблюдения, тем больше вероятность, что он будет полностью или частично заслонен другим, более близким к наблюдателю, объектом.
Алгоритм Ньюэлла-Ньюэлла-Санча:
Это представитель класса алгоритмов основанных на точной сортировке по глубине. Если удается получить точно отсортированный список, то никакие два объекта не будут взаимно перекрывать друг друга.
- Сформировать предварительный список приоритетов по глубине, используя в качестве ключа сортировки значение zmin для каждого многоугольника. Первым в списке будет многоугольник с минимальным значением zmin. Этот многоугольник лежит дальше всех от точки наблюдения, расположенной в бесконечности на положительной полуоси z. Обозначим его через Р, а следующий в списке многоугольник - через Q.
- Для каждого многоугольника Р из списка надо проверить его отношение с Q:
1) Если ближайшая вершина Р (Рzmax) будет дальше от точки наблюдения, чем самая удаленная вершина Q (Qzmin), т.е. Qzmin >= Рzmax и никакая часть Р не может экранировать Q. Занести Р в буфер кадра (рис.1, а);
2) Если Qzmin < Рzmax потенциально P экранирует не только Q, но также и любой другой многоугольник типа Q из списка, для которого Qzmin < Рzmax. Тем самым образуется множество [Q]. Однако Р может фактически и не экранировать ни один из этих многоугольников. Если последнее верно, то Р можно заносить в буфер кадра. Для ответа на этот вопрос используется серия тестов, следующих по возрастанию их вычислительной сложности.
Эти тесты ниже формулируются в виде вопросов. Если ответ на любой вопрос будет положительным, то Р не может экранировать {Q}. Поэтому Р сразу же заносится в буфер кадра.