

5. Геометрические параметры прямозубых цилиндрических зуб колес.
Д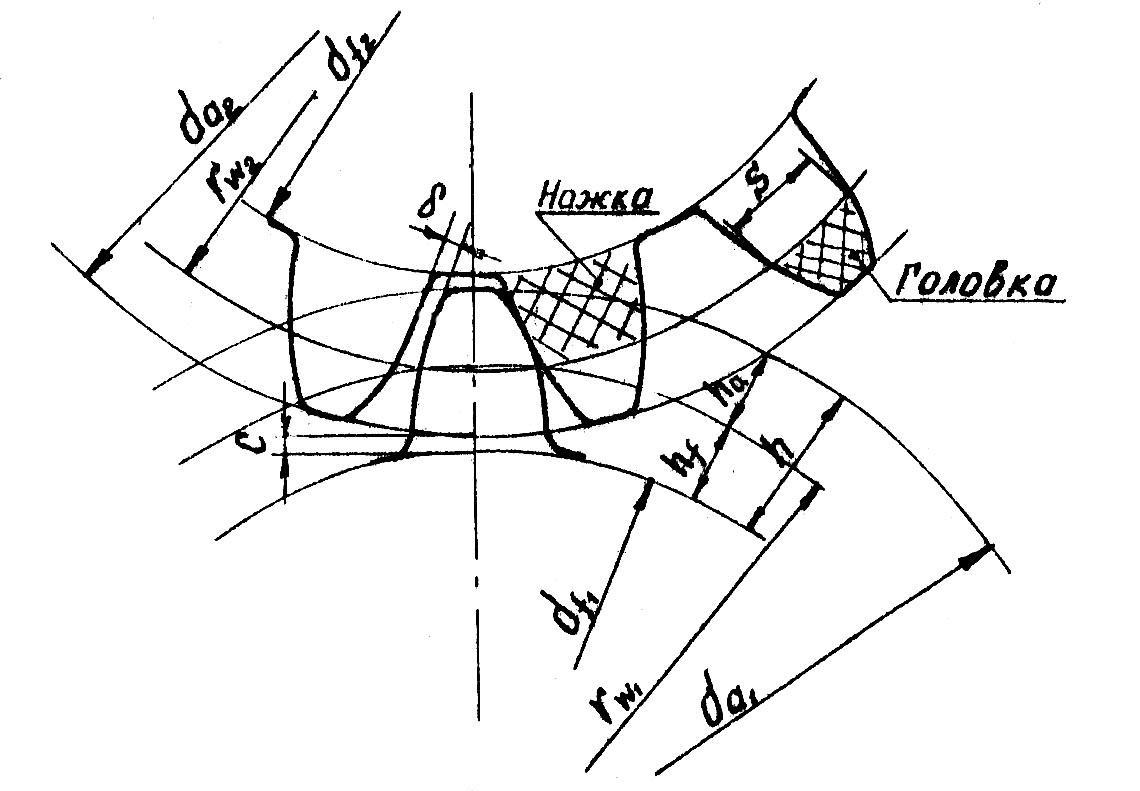 ано
2 зубчатых колеса, находящихся в
зацеплении, в плоскости, перпендикулярной
к оси вращения.
ано
2 зубчатых колеса, находящихся в
зацеплении, в плоскости, перпендикулярной
к оси вращения.
Z-число зубьев (мин. – 17, макс. – до 220).
Эвольвента– траектория, которую описывает любая точка прямой, перекатывающейся без скольжения по окружности.
При зацеплении одного колеса с другим появляется начальная окружность радиусом rw. Это окружность одного зубчатого колеса, перекатывающаяся без скольжения по окружности (поверхности) второго. Расстояние между одноименными профилями соседних зубьев по дуге окружности называется окружным шагом и обозначается pt. Пользуясь шагом зацепления, можно выразить длину любой окружности колеса, умножив шаг на число зубьев z:
ptz = πdt, где t – индекс соответствующей окружности, например, pa, da или pf, df.
основным параметром принят не шаг, а отношение его к числу π. Эта величина называется модулем зацепления mt:
mt = pt/π. |мм| Чаще всего согласно стандартам ограничиваются следующими значениями модуля (в миллиметрах): 0,05; 0,06; 0,08; 0,1; 0,12;0,15; 0,20; 0,25….
Окружность, по которой модуль имеет расчетное стандартное значение, называется делительной. Диаметр ее обозначается d, она является базовой для определения элементов зубьев и их размеров, Диаметр делительной окружности d = mz
Окружная толщина s зуба по делительной окружности s = p/2 = πm/2
Высота головки зуба ha = ha*∙m, где ha* – коэффициент высоты головки, который в соответствии со стандартом равен единице (ha* = 1), а высота головки равна модулю (ha = m). ; Высота ножки зуба hf = (ha* + c*)m, где с = с*m – величина радиального зазора между зубьями колес, находящихся в зацеплении; с* – коэффициент радиального зазора, который зависит от величины модуля: с* = 0,5 при m ≤ 0,5 мм, с* = 0,35 при 0,5 < m < 1 мм и с* = 0,25 при m ≥ 1 мм. Высота зуба h = ha + hf = m(2 + c*). Диаметры окружности выступов
da = d + 2ha = m(z + 2). Диаметры окружности впадин df = d – 2hf = m(z – 2 – 2c*)
Достоинство: передаточное отношение не зависит от погрешности межосевого расстояния колес. Одним инструментом можно нарезать колеса с разным числом зубьев.
6. Кинематические исследования зубчатых механизмов.
В простой зубчатой передаче, состоящей из двух находящихся в зацеплении колес, при внешнем зацеплении колеса вращаются в разные стороны, поэтому передаточное отношение отрицательное, а в передаче с внутренним зацеплением передаточное отношение положительное, т.е.
i12 = ω1/ω2 = z2/z1, где знак «–» принимают при внешнем зацеплении колес, знак «+» – при внутреннем.
Передаточное отношение, которое можно воспроизвести одной парой зубчатых колес (исключая червячную передачу) невелико. При необходимости получения больших передаточных отношений применяют многоступенчатую передачу.
Р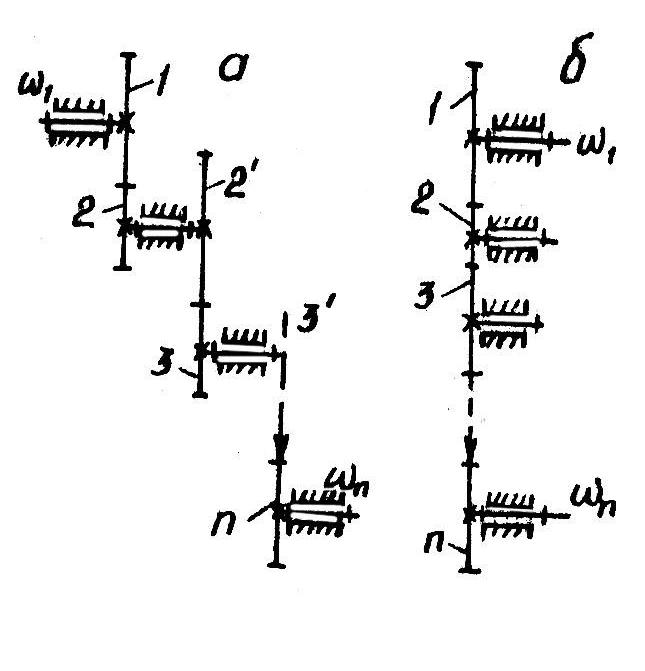 ассмотрим
плоский ступенчатый зубчатый механизм
(рис. а), представляющий собой
последовательное соединение нескольких
простых механизмов. На каждом промежуточном
валу находится не менее двух колес,
зацепляющихся соответственно с колесами
предыдущего и последующего валов.
Ведущим является колесо 1, общее
передаточное отношение всего механизма
i1n
= ω1/ωn,
где ω1,
ωn
– соответственно скорости вращения
ведущего и выходного n-го звена.
Передаточные отношения простых
механизмов, состоящих из одной пары
колес, находящихся в зацеплении - i12
= ω1/ω2
= –z2/z1;
i23
= ω2/ω3
= –z3/z2'
и т.д. Перемножим полученные соотношения
i12∙i23∙…∙
ассмотрим
плоский ступенчатый зубчатый механизм
(рис. а), представляющий собой
последовательное соединение нескольких
простых механизмов. На каждом промежуточном
валу находится не менее двух колес,
зацепляющихся соответственно с колесами
предыдущего и последующего валов.
Ведущим является колесо 1, общее
передаточное отношение всего механизма
i1n
= ω1/ωn,
где ω1,
ωn
– соответственно скорости вращения
ведущего и выходного n-го звена.
Передаточные отношения простых
механизмов, состоящих из одной пары
колес, находящихся в зацеплении - i12
= ω1/ω2
= –z2/z1;
i23
= ω2/ω3
= –z3/z2'
и т.д. Перемножим полученные соотношения
i12∙i23∙…∙
i(n–1)n=(ω1/ω2)∙(ω2/ω3)∙…(ωn–1/ωn) = ω1/ωn, но ω1/ωn = i1n, поэтому
i1n = i12∙i23∙…∙i(n–1)n, (3.22)
т.е. передаточное отношение многоступенчатой передачи равно произведению передаточных отношений всех простых зубчатых передач, входящих в механизм. Зависимость можно выразить через числа зубьев колес. Для схемы, представленной на рис. 3.8, а, она примет вид:
i1n = (–1)k(z2/z1)∙(z3/z2')∙…∙(zn/z(n–1)'), где z1, z2', …, zn – число зубьев колес передачи;
k – число внешних зацеплений.