

Формулы приведения

Формулы сложения тригонометрических функций
sin (α + β) = sin α · cos β + sin β · cos α
sin (α - β) = sin α · cos β - sin β · cos α
cos (α + β) = cos α · cos β - sin α · sin β
cos (α - β) = cos α · cos β + sin α · sin β
tg (α + β) = (tg α + tg β) ÷ (1 - tg α · tg β)
tg (α - β) = (tg α - tg β) ÷ (1 + tg α · tg β)
ctg (α + β) = (ctg α · ctg β + 1) ÷ (ctg β - ctg α)
ctg (α - β) = (ctg α · ctg β - 1) ÷ (ctg β + ctg α)
Формулы для половиннных углов |
Для любого угла α справедливы равенства:
cos2α/2 = (1 + cos α)/2 |
sin2α/2 = (1 – cos α)/2 |
Для любого угла α такого, что α ≠ π + 2πk (k принадлежит множеству Z), справедливо:
tg2α/2 = (1 – cos α)/(1 + cos α) |
ctg2α/2 = (1 + cos α)/(1 – cos α) |
tg α/2 = sin α/(1 + cos α) |
cos α = (1 – tg2α/2)/(1 + tg2α/2) |
sin α = (2 tg α/2)/(1 + tg2α/2) |
Для любого угла α такого, что α ≠ πk (k принадлежит множеству Z), справедливо:
tg α/2 = (1 – cos α)/(sin α) |
ctg α = (1 – tg2α/2)/(2 tg α/2) |
Для любого угла α такого, что α ≠ π + 2πk и α ≠ π/2 + πn (k, n принадлежат множеству Z), справедливо:
tg α = (2 tg α/2)/(1 – tg2α/2) |
функции y=sinx и основные свойства и графики
а) Область определения: D (sin x) = R .
б) Множество значений: E (sin x) = [ – 1 , 1 ] . в) Четность, нечетность: функция нечетная.
г) Периодичность: функция периодическая с основным периодом
T
= 2![]() .
.
д) Нули
функции:
sin x =
0 при x =
n, n ![]() Z.
Z.
е) Промежутки знака постоянства:
![]() ;
; ![]() .
.
ж) Промежутки
монотонности:
![]() ;
;
![]() .
.
з) Экстремумы:
![]() ;
; ![]() .
.
График функции y= sin x изображен на рисунке.

функции y= cos x
а) Область определения: D (cos x) = R .
б) Множество значений: E (cos x ) = [ – 1 , 1 ] . в) Четность, нечетность: функция четная.
г) Периодичность: функция периодическая с основным периодом
T = 2 .
д) Нули
функции:
cos x =
0 при x = ![]() +
n, n
Z.
+
n, n
Z.
е) Промежутки знака постоянства:
![]() ;
;
![]() .
.
. ж) Промежутки монотонности:
![]() ;
;
![]() .
.
з) Экстремумы:
![]() ;
; ![]() .
.
График функции y= cos x изображен на рисунке.

функции y=tg x
а) Область определения: D (tg x) = R \ { /2 + n( n Z ) }.
б) Множество значений: E (tg x ) = R . в) Четность, нечетность: функция нечетная.
г) Периодичность: функция периодическая с основным периодом
T = .
д) Нули функции: tg x = 0 при x = n, n Z.
е) Промежутки знакопостоянства:
![]() ;
;
![]() .
.
ж) Промежутки монотонности: функция возрастает на каждом интервале, целиком принадлежащем ее области определения.
з) Экстремумы: нет.
График функции y = tg x изображен на рисунке.

функции y=ctg x
а) Область определения: D (ctg x) = R \ { n( n Z ) }.
б) Множество значений: E (ctg x ) = R . в) Четность, нечетность: функция нечетная.
г) Периодичность: функция периодическая с основным периодом T = .
д) Нули функции: ctg x = 0 при x = /2 + n, n Z.
е) Промежутки
знакопостоянства ;
![]() ;
; ![]() .
.
ж) Промежутки монотонности: функция убывает на каждом интервале, целиком принадлежащем ее области определения.
з) Экстремумы: нет.
График функции y = ctg x изображен на рисунке.

Определение функции.
пусть ![]() –
угол между подвижным
радиус-вектором OM= { x, y} и
его начальным положением OA.
–
угол между подвижным
радиус-вектором OM= { x, y} и
его начальным положением OA.
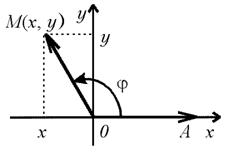
а) Синусом
угла ![]() называется
отношение ординаты y
конца подвижного радиус-вектора r = OM к
длине r =
| r
| этого
радиус-вектора,
т.е.
называется
отношение ординаты y
конца подвижного радиус-вектора r = OM к
длине r =
| r
| этого
радиус-вектора,
т.е.
![]() б) Косинусом угла
называется
отношение абсциссы x
конца подвижного радиус-вектора r = OM к
длине r =
| r
| этого
радиус-вектора, т.е.
б) Косинусом угла
называется
отношение абсциссы x
конца подвижного радиус-вектора r = OM к
длине r =
| r
| этого
радиус-вектора, т.е.
![]()
в) Тангенсом угла
называется
отношение ординаты y
к абсциссе x
конца
подвижного радиус-вектора OM .
т.е.
![]()
г) Котангенсом угла
называется
отношение абсциссы x
к ординате y
конца
подвижного радиус-вектора OM ,
т.е.
![]()
д)
Функции секанс и косеканс определяются
соотношениями
![]()
Подчеркнем, что отношения
![]()
зависят
только от величины угла
и
не зависят от длины r![]() радиус-вектора OM.
Это означает, что тригонометрические
функции
радиус-вектора OM.
Это означает, что тригонометрические
функции
![]()
являются
функциями только угла
.
При этом угол
часто
называют аргументом
тригонометрических функций.
При
вычислении тригонометрических функций
можно пользоваться подвижными
радиус-векторами длины r
= 1.
Концы таких векторов лежат на единичной
окружности ![]() .
В этом случае
.
В этом случае
![]()
Область определения - это значения "Х"
(т.е. какие значения может принимать Х) А область значения - это "у" (т.е. какие "у" при этом получаются)
4 способа задания функции: