

2. Динамика точки
2.1. Дифференциальные уравнения движения материальной точки
Пусть r - радиус вектор (рис. 1.2) определяющий положение точки в инерциальной системе отсчета.

Рис.1.2.
Тогда ускорение точки

С учетом этого, основное уравнение динамики можно записать в виде:
![]()
Полученное выражение является также дифференциальным уравнением движения материальной точки в векторной форме.
Проектируя обе части последнего векторного равенства на оси прямоугольной системы координат получим скалярные выражения представляющие собой дифференциальные уравнения движения точки в осях x, y, z :

Дифференциальные уравнения движения точки при естественном способе задания движения получаются в результате проектирования основного уравнения динамики на оси естественного тетраэдра (рис. 1.3) :
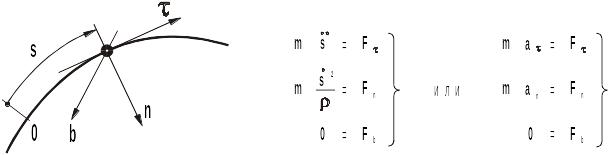
Рис.1.3.
 -
касательная к траектории, n
– нормаль, b
– бинормаль,
-
касательная к траектории, n
– нормаль, b
– бинормаль, -
радиус кривизны траектории.
-
радиус кривизны траектории.
3. Две основные задачи динамики
3.1. Первая задача. Зная массу точки и закон её движения определяют действующие на точку силы.
Так, если движение точки задано в прямоугольной системе координат, то суть задачи состоит в следующем:
Дано: m , x = f (t) , y = f (t) , z = f (t) .
----------------------------------------------------------
Определить: Fx , Fy , Fz .
В основе решения первой задачи динамики точки лежит дифференцирование её уравнений движения.
3.2.Вторая основная задача динамики
Вторая задача. Зная массу точки и действующие на неё силы определяют закон её движения.
При задании движения точки в прямоугольной системе координат задача имеет вид:
Дано: m , Fx , Fy , Fz .
----------------------------------------------------
Определить: x = f (t) , y = f (t) , z = f (t) .
В основе решения второй задачи динамики лежит интегрирование дифференциальных уравнений движения.. При этом, следует иметь в виду, что сила действующая на материальную точку может быть постоянной или зависить от времени, координат движущейся точки и её скорости. Следовательно, в общем случае, вторая задача динамики сводится к необходимости решения системы дифференциальных уравнений, как например:
m x = Fx ( x, y, z, x, y, z, t )
m y = Fy ( x, y, z, x, y, z, t )
m z = Fz ( x, y, z, x, y, z, t )
в которые искомые функции x, y и z входят вместе со своими первыми и вторыми производными.При решении второй задачи динамики в общем виде решение может быть представлено в виде:



 -
постоянные интегрирования, которые
определяются путем подстановки в
уравнения начальных условий.
-
постоянные интегрирования, которые
определяются путем подстановки в
уравнения начальных условий.
Для определения каждого коэффициента c необходимо в правую часть уравнения вместо времени подставить 0 (t0 = 0), а в левую часть уравнения начальные значения рассчитываемого параметра.
Таким образом, окончательное решение второй задачи динамики можно представить в виде:
В торая
основная задача динамики на практике
встречается гораздо чаще. Она подразделяется
в зависимости от действующих сил:
торая
основная задача динамики на практике
встречается гораздо чаще. Она подразделяется
в зависимости от действующих сил:
1. Сила – постоянная величина
2. Сила зависит от расстояния
3. Сила зависит от скорости
4. Сила зависит от времени