

5. Общее сведения об электромеханических приборах.
Электромеханические приборы применяют для измерения тока, напряжения, мощности, сопротивления и других электрических величин в цепях постоянного и переменного тока низкой частоты. Широко используют их в качестве выходных устройств приборов для измерения магнитных величин, параметров радиотехнических сигналов, характеристик электрических цепей.
Электромеханические приборы, как правило, состоят из простейшей схемы преобразования измеряемой величины и измерительного механизма.
Такой прибор можно представить в виде трех узлов:
ОУ
– отсчетное устройство. ИЦ – измерительная
цепь. ИМ – измерительный механизм
![]()
ИЦ служит для преобразования измеренной величины в другую, непосредственно воздействующую на ИМ. Это преобразование может быть количественное и качественное.
Измерение очень больших и очень малых величин – это количественное преобразование.
Измерения напряжения резистора (падения напряжения) это качественное преобразование.
В ИМ электрическая энергия преобразуется в механическую, так как обычно в этих приборах применяется угловое перемещение то рассматриваются моменты, действующие на подвижную часть. Они делятся на:
1) статические
2) динамические
Статические моменты – это моменты, действующие в ИМ всегда при наличии измеряемой величины.
Динамические– моменты, действующие в ИМ только во время движения.
Статические моменты
1)
Вращающий – момент, возникающий в
механизме под действием измеряемой
величины и поворачивающий подвижную
часть в сторону возрастающих показаний.
М должен однозначно определять измеряемой
величиной x и углом поворота M = f(x,α) . Из
теоретической механики![]() - обобщенное выражение вращающего
момента, Wэ – эл/кин. энергия (например
катушки).
- обобщенное выражение вращающего
момента, Wэ – эл/кин. энергия (например
катушки).
2) Противодействующий – направлен навстречу вращательному и зависит от α:
Mпр = - f(α)
Если бы повороту подвижной части под действием вращающего момента ничто не препятствовало бы, то при любом значение измеряемой величины, отличном от 0, она повернулась бы до упора, и мы получили бы индикатор, а не прибор. Чтобы α зависел от измеряемой величины создается противодействующий момент.
При некотором угле поворота наступает динамическое равновесие, а именно: M = - Mпр или М + Мпр = 0
По способу создания противодействующего момента приборы делятся на две группы:
1) с механическим противодействующим моментом
2) с электрическим противодействующим моментом.
В приборах первой группы Мпр создается с помощью упругих элементов, всегда пропорционален α: Мпр = - Wα где W – удельный противодействующий момент.
Элементы используемые для создания противодействующего момента:
- спиральные пружины;
- растяжки;
- подвес
С пиральные
пружины используются, если подвижная
часть установлена на опорах:
пиральные
пружины используются, если подвижная
часть установлена на опорах:
1,2 – спиральные пружины (число витков достаточно велико)
![]()
Растяжки – металлические нити
1
1'
Подвес – «одна растяжка»

1» – подвес
Эти элементы (спиральные пружины, растяжки, подвес) используются также как токоотводы к подвижной части.
Динамические моменты (направлены навстречу вращению)
1) момент сил инерции - появляется из за инерционности (m)
![]() I – момент инерции
I – момент инерции
2)
момент успокоения – зависит от скорости
![]() P – коэффициент успокоения
P – коэффициент успокоения
соединим все уравнения:
МI + MP + Mпр + M = 0
и получим дифференциальное уравнение:
![]() – неоднородное дифференциальное
уравнение 2-ого порядка
– неоднородное дифференциальное
уравнение 2-ого порядка
Введем дифференциальный оператор ρ ; запишем в операторной форме:
![]()
Найдем передаточную функцию (отношение выхода ко входу)
![]()
![]()
Заменив оператор ρ = jω , получим:
![]() - как различные механизмы реагируют на
изменение измеряемой величины (вращающего
момента) см. график
- как различные механизмы реагируют на
изменение измеряемой величины (вращающего
момента) см. график
![]() , где
, где
![]() ω
– частота временного момента;
ω
– частота временного момента;
![]() - частота собственных колебаний подвижной
части
- частота собственных колебаний подвижной
части
![]()
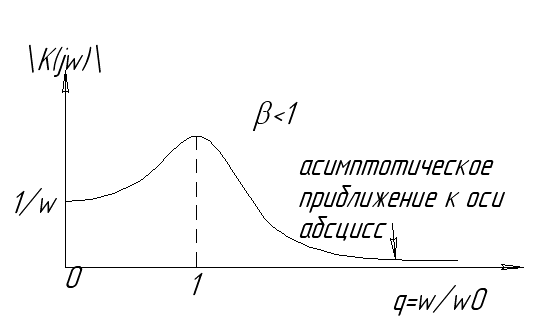 -
степень успокоения (коэффициент
демпфирования)
-
степень успокоения (коэффициент
демпфирования)
По принципу создания вращающего момента электромеханические приборы делятся на:
1)
магнитоэлектрические:
![]() магнит и катушка
магнит и катушка
Противодействующий момент создается также как и вращающий
2)электромагнитные:
![]()
Взаимодействие катушки по которой течет ток и ферромагнитн. сердечника
3)
электродинамические
![]()
Взаимодействие катушек
4)
ферродинамические
![]()
Как и электродинамические но имеют сердечник
5)
электростатические
![]()
Взаимодействие пластин с подвижными частями
6)
индукционные (счетчик)
