

2.3. Общие принципы управления и регулирования
Работа автоматических систем основывается на общих принципах. Принцип автоматического управления или регулирования определяет, как и на основе какой информации осуществить регулирование.
Разомкнутые системы работают по принципу передачи команд, или, иначе, по жесткой программе. В этом случае информация о состоянии объекта на вход системы не поступает и управление обеспечивает последовательность заранее заданных воздействий, включение приводов механизмов или самостоятельных систем. Если в таких системах после выполнения каждой команды поступает информация в управляющее устройство и разрешает переход к следующей операции, то их называют системами с путевым контролем. Металлообработка чаще всего связана с перемещением рабочего инструмента или деталей, поэтому информация о переходе в заданную точку передается с помощью путевых выключателей любой конструкции. Отдельные операции могут задаваться и с помощью временных интервалов.
Е
Рис. 9. Схема системы регулирования по
возмущению
Примером САР, работающим по принципу компенсации возмущения, является сварочный генератор со смешанным возбуждением. В этом генераторе обеспечивается инвариантность напряжения генератора Uн от тока в нагрузке RH. Согласное включение последовательной обмотки W2 с независимой W1 позволяет добиться требуемой инвариантности, т. к. изменение тока в нагрузке приводит к изменению магнитного потока Ф2 и изменению напряжения на нагрузке в сторону уменьшения рассогласования (рис. 10, б).
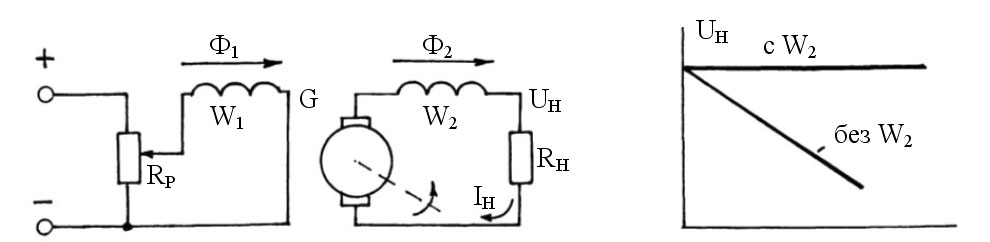
а) б)
Рис. 10. Схема генератора смешанного возбуждения (а) и его характеристика (б)
Достоинством такого регулирования является высокая точность и быстродействие. Однако если в генераторе (рис. 10, а) изменится напряжение питания независимой обмотки W1, то такое возмущение не будет компенсировано и для нормальной работы будет необходим еще один регулятор – стабилизатор напряжения, что и делается на практике. Таким образом, недостатком САР, работающих по этому принципу, является то, что инвариантность достигается только для одного возмущающего воздействия. Наличие других приводит к тому, что задача регулирования не выполняется. Создание отдельного регулятора для каждого возмущения усложняет систему, поэтому такое регулирование применяют в том случае, когда можно выделить одно главное возмущение, а остальным пренебречь. В таких системах регулирующее воздействие зависит только от возмущения μ=f(F), и они являются разомкнутыми, т. к. информация о состоянии объекта y(t) в системе отсутствует.
В замкнутых системах реализуется принцип регулирования по отклонению (по ошибке). Для реализации этого принципа регулируемая величина с помощью отрицательной обратной связи сравнивается с заданным значением и в зависимости от величины и знака ошибки вырабатывается такое регулирующее воздействие, которое сводило бы ∆y = g(t)–y(t) к нулю. Принцип управления по отклонению иногда называют принципом обратной связи. Этот принцип является универсальным и эффективным, т. к. позволяет осуществлять регулирование объекта независимо от того, какими причинами вызвано отклонение регулируемой величины. Недостатком принципа является относительно невысокое быстродействие и точность, а кроме этого, такие системы склонны к колебаниям. Структурная схема такой системы показана на рис. 4.
Объединение принципов регулирования по отклонению и по возмущению увеличивает точность и быстродействие. Такой принцип называется принципом комбинированного регулирования. В этом случае главное возмущение устраняется по принципу регулирования по возмущению, а влияние других возмущений ликвидируется регулированием по ошибке. Структурная схема такой системы показана на рис. 11.
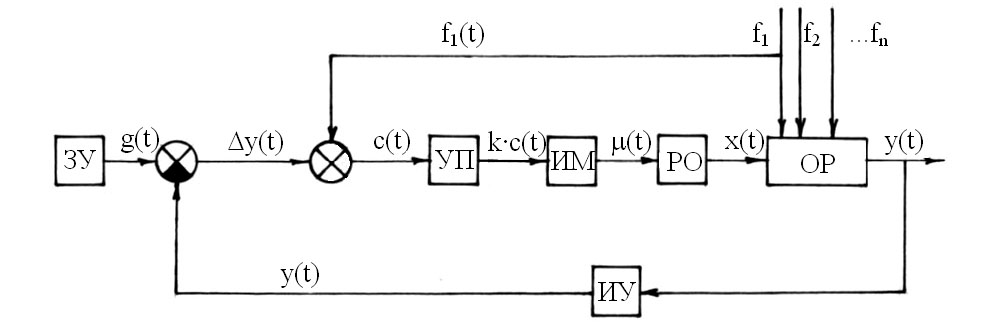
Рис. 11. Структурная схема системы с принципом комбинированного регулирования