

1.4 Вимоги до промислових сар|
Для того, щоб технологічне устаткування|обладнання| працювало з|із| високим ККД, із|із| заданою продуктивністю, давало продукцію необхідної якості і працювало надійно, необхідно підтримувати величини, що характеризують процес, в більшості випадків постійними. Це найважливіше завдання|задача| покладене на промислові системи автоматичного регулювання і стабілізації технологічних процесів.
У системах стабілізації - сигнал заданої точки (завдання|задавання|, встановлення| регулятора|регулювальник|) залишається постійним в перебігу тривалого часу роботи. Інший, не менш важливим|поважний| завданням|задача|, є|з'являтися,являтися| завдання|задача| програмного управління технологічним агрегатом, що забезпечує перехід на нові режими роботи. Вирішення|розв'язання,розв'язування| цієї проблеми здійснюється за допомогою тієї ж системи автоматичної стабілізації, завдання|задавання| якої змінюється від програмного задатчика|.
Для більшості промислових САР| необхідна достатньо|досить| висока точність їх роботи ±(1-1.5)%. При цьому головне призначення системи стабілізації - це компенсація зовнішніх збуджуючих |бентежачих| дій, що діють на об'єкт управління.
Структурна схема одноконтурної САР| промисловим об'єктом управління приведена на мал. 1.7:
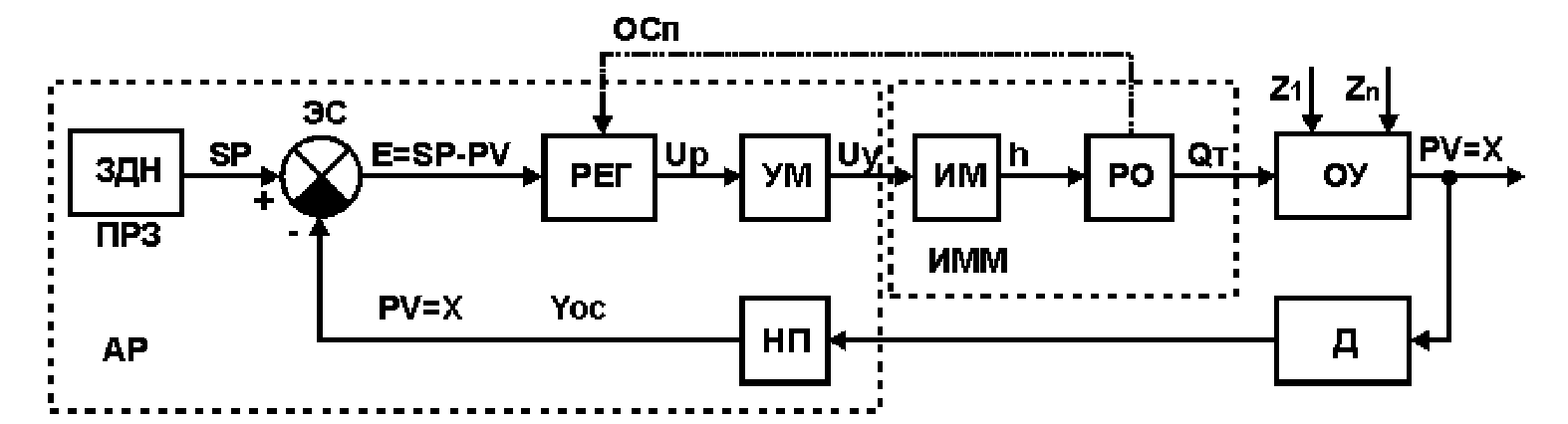
Малюнок 1.7 - Структурна схема одноконтурної САР| промисловим об'єктом управління
Пояснення до малюнка 1.7:
Основні елементи: ЗДН| - задатчик|, ПРЗ| - програмний задатчик|, ЕС| - елемент порівняння, РЕГ| - автоматичний регулятор|регулювальник|, ПП|глузд| - підсилювач потужності, АР - автоматичний регулятор|регулювальник| (сучасні регулятори|регулювальник| з’єднюють| вузли ЗДН|, ПРЗ|, РЕГ|, ПП|глузд|, НП|), ВМ - виконавчий механізм, РО| - регульований орган, ЗЗп - зворотний зв'язок по положенню|становище| регулюючого органу, ОУ| - об'єкт управління, Д - датчик (первинний перетворювач), НП| - нормуючий перетворювач (у сучасних мікропроцесорних системах управління і регуляторах|регулювальник|, є|з'являтися,являтися| вбудованим вхідних пристроєм|устрій|).
Позначення змінних: SP- задаючий сигнал, E - помилка регулювання, Up- вихідний сигнал регулятора|регулювальник|, Uу - напруга|напруження|, що управляє, h - переміщення регулюючого органу, Qт- витрата речовини або енергії, Z - збуджуючої|бентежачі| дії, PV=X - регульований параметр (наприклад температура), Yос - сигнал зворотного зв'язку (вихідна напруга|напруження| або струм|тік| перетворювача).
Характерною|вдача| особливістю схеми є|з'являтися,являтися| наявність нормуючого перетворювача НП|, що забезпечує роботу автоматичного регулятора|регулювальник| із|із| стандартними значеннями струму|тік| (0-5, 0-20, 4-20mA) або напруги|напруження| (0-10 В). Нормуючий перетворювач НП| виконує наступні|слідуючий| функції:
1) перетворить нестандартний вхідний сигнал (mB, Ом) в стандартний вихідний сигнал;
2) здійснює фільтрацію вхідного сигналу;
3) здійснює лінеаризацію статичної характеристики датчика;
4) стосовно термопари, здійснює температурну компенсацію холодного спаю.
У сучасних промислових регуляторах|регулювальник| нормуючий перетворювач НП| як правило є|з'являтися,являтися| обов'язковою складовою частиною вхідного пристрою|устрій| регулятора|регулювальник| АР (див. мал. 1.7).