

2.10.7 Динамічний коефіцієнт регулювання Rd
Динамічний коефіцієнт регулювання Rd визначається з|із| формули:
![]() (2.26)
(2.26)
де значення величин Y1 і Y0 визначаються згідно мал. 2.13.
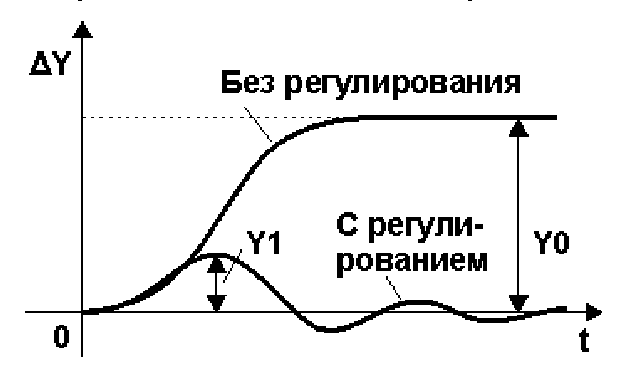
Малюнок 2.13- До поняття динамічного коефіцієнта регулювання
Величина динамічного коефіцієнта Rd характеризує ступінь|міра| дії регулятора|регулювальник| на процес, т.е. ступінь|міра| пониження динамічного відхилення в системі з|із| регулятором|регулювальник| і без нього.
2.10.8 Показник тієї, що коливає м
Показник тієї, що коливає M характеризує величину максимуму модуля частотної передавальної функції замкнутої системи (на частоті резонансу) і, тим самим, характеризує коливальні властивості системи. Показник тієї, що коливає наочно|наглядно| ілюструється на малюнку 2.14.
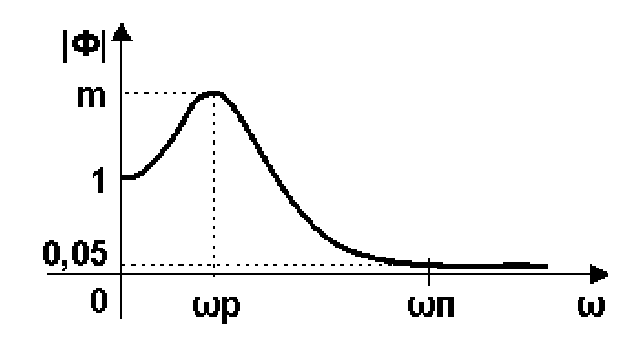
Малюнок 2.14 - Графік модуля частотної передавальної функції замкнутої системи
Умовно вважається|лічиться|, що значення М=1,5-1,6 є|з'являтися,являтися| оптимальним для промислових САР|, оскільки в цьому випадку у|в,біля| забезпечується в районі від 20% до 40%. При збільшенні значення M та, що коливає в системі зростає.
В деяких випадках нормується смуга пропускання системи щп|, яка відповідає рівню посилення в замкнутій системі 0,05. Чим більше смуга пропускання, тим більше швидкодія замкнутої системи. Проте|однак| при цьому підвищується чутливість системи до шумів в каналі вимірювання|вимір| і зростає дисперсія помилки регулювання.
3 Типи регуляторів|регулювальник|. Закони регулювання
У даному розділі приводиться|призводиться,наводиться| опис основних типів регуляторів|регулювальник| і законів регулювання.
Класифікація систем автоматичного регулювання (САР|) приведена в таблиці 1.3 разд.1.3.
У розділах 3.1-3.3 приведені описи алгоритмів роботи і закони регулювання релейних (позиційних) регуляторів|регулювальник|. Релейні (позиційні) регулятори|регулювальник| видають сигнал, який забезпечує переміщення регулюючого органу в одне з фіксованих положень|становище| (позицій). Їх може бути два, три і більш. По кількості позицій розрізняють двох-|, трьох- і багатопозиційні регулятори|регулювальник|.
У розділах 3.4-3.5 приведені описи алгоритмів роботи і закони регулювання безперервних П-, ПІ-|, ПІД-регуляторів|регулювальник|.
3.1 Двохпозиційні регулятори|регулювальник|
3.1.1 Призначення. Принцип роботи
Двохпозиційні регулятори|регулювальник| забезпечують хорошу|добрий| якість регулювання для інерційних об'єктів з|із| малим запізнюванням, не вимагають настройки і прості в експлуатації. Ці регулятори|регулювальник| представляють|уявляти| звичайний|звичний| і найбільш широко поширений метод регулювання.
Двохпозиційні регулятори|регулювальник| використовуються для управління елементами перемикачів -дискретними виконавчими пристроями|устрій|:
• електромеханічними реле
• контакторами
• транзисторними ключами|джерело|
• симісторними| або тиристорними| пристроями|устрій|
• твердотільними|твердотілий| реле і ін.
У простому випадку (без зворотного зв'язку) двохпозиційний регулятор|регулювальник| працює як двохпозиційний перемикач.
Наприклад, потужність, що подається на нагрівач|, має тільки|лише| два значення - максимальне і мінімальне (нульове), дві позиції (звідси і назва регулятора|регулювальник| - двохпозиційний) - нагрівач| повністю включений або повністю вимкнений.
Структурна схема двохпозиційної системи регулювання приведена на мал. 3.1.
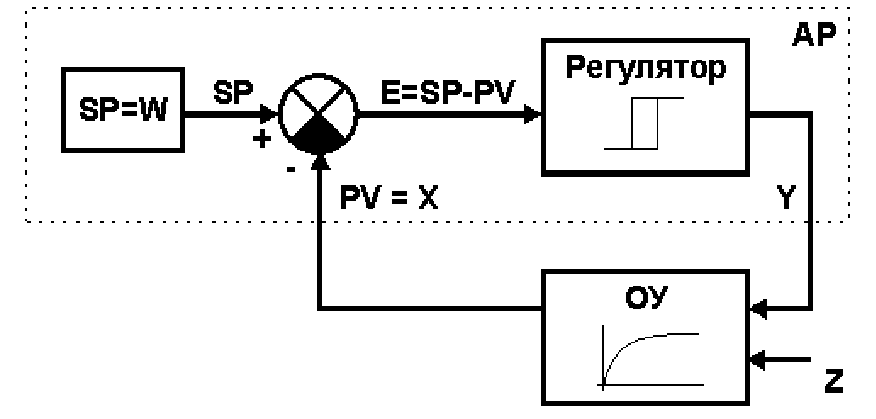
Малюнок 3.1 - Структурна схема двохпозиційної системи регулювання
де: АР - двохпозиційний регулятор|регулювальник|, ОУ-| об’єкт| управління, SP - вузол формування заданої точки (завдання|задавання|), Е - розузгодження регулятора|регулювальник|, PV=X- регульована величина, У|в,біля| - що управляє
дія, Z - збуджуюча|бентежача| дія.
Для запобігання «коливання» вихідного пристрою|устрій| (наприклад, реле), що управляє, і виконавчого механізму (наприклад, нагрівального елементу) поблизу завдання|задавання| SP (дуже|занадто| частого включення|приєднання| нагрівача|), передбачається гістерезис Н - див. розділ 3.1.3.
Наприклад, опис роботи двохпозиційної системи регулювання температури в печі за допомогою нагрівача|, може бути представлено|уявлено| таким чином:
• Нагрівач| включений, поки|доки| температура в печі (X=PV) не досягне значення заданої точки SP.
• Вихід регулятора|регулювальник| Y (нагрівач|) відключається, якщо регульована величина (температура) вище заданої точки SP.
• Повторне включення|приєднання| нагрівача| відбувається|походити| після|потім| зменшення температури до значення SP-H, тобто з урахуванням|з врахуванням| гістерезису H елементу перемикача.