Проектирование лазерных систем локации
1) Проектирование
выбор типа лазера
режим работы
способы формирования параметров излучения
конструктивное отделение блоков и узлов
разработка технологии производства
методов контроля, испытаний
2) Этапы проектирования
предварительный
технологический
эскизный
Каждый включает теоретические и экспериментальные исследования. На первом этапе предэскизные проект (аван-проект), завершается испытанием лабораторного макета. На втором и третьем эскизные и технологические проекты. Завершается испытанием экспериментального и опытного образца.
3) Задачи проектирования
- частичная модернизация существующего устройства
Улучшение на 20-30% одного или нескольких параметров
- существенная модернизация
Улучшение в 2-3 раза
- Создание нового устройства, основанного на новых схемных решениях для резкого улучшения одного или нескольких параметров (на порядок или больше)
Оптическая локация – совокупность методов обнаружения и измерения координат удаленных объектов, а так же распознавания их формы с помощью э/м излучением.
Дальнометрия – основа локации (1934г. Лебедев А.А., 1936г. - реализация)
Структурная схема ЛЛС:
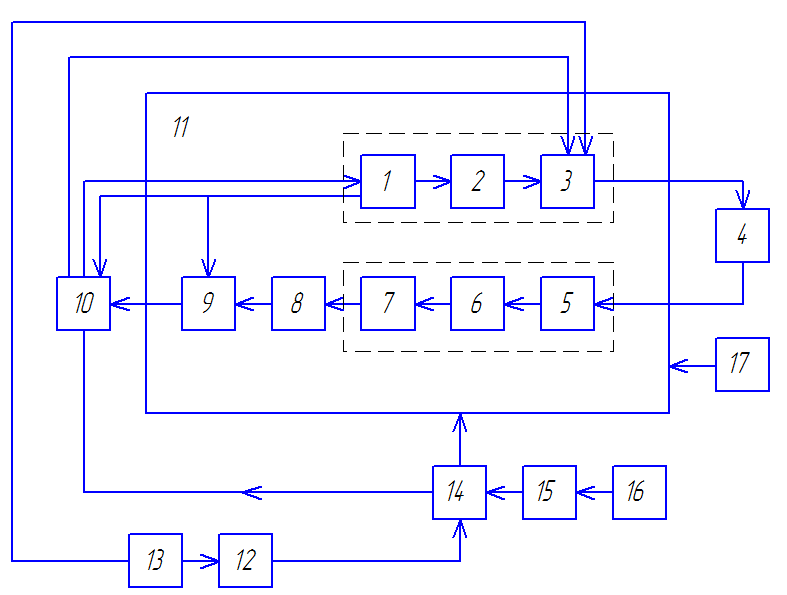
Лазер
Коллимирующий блок
Отклоняющий сканирующий блок
Цель
Блок широкоугольной оптики
Отклоняющий сканирующий блок
Блок узкополосной оптики
Узкополосный оптический фильтр
Оптический приемник излучения
Система первичной обработки локационных данных
Подвижное основание
усилительно сглаживающие цепи грубого и точного контуров сист. авт. сопровождения цели
-,,-
Система управления и наведения
Исходные данные для целиуказания
Цели указания
Опт. мех. система ручного наведения
1-3 передающая часть
5-7 принимающая часть
10 - обнаружение сигналов, определения координат цели, дальности R, углов α, β и их производных
Этапы:
Определение сигнала на фоне помех и принятие решения о наличии сигнала
Измерение R, α, β
(Прямое фотодетектирование )
Фазовый метод – непрерывные лазеры (He-Ne) 10мВт

m- коэффициент модуляции (0,1)
 -
масштабная частота (частота модуляции)
-
масштабная частота (частота модуляции)
P – Средняя мощность

 -сдвиг
фазы масшт. колеб. при отражении от цели
-сдвиг
фазы масшт. колеб. при отражении от цели
 -
сдвиг фазы в цепях дальномера
-
сдвиг фазы в цепях дальномера
Схема фазового дальномера:
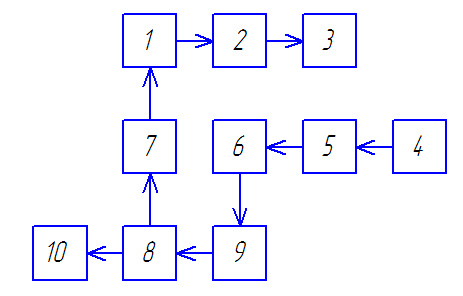
Непрерывный лазер
Модулятор амплитуды
Передающая телескопическая система
Приемная телескопическая система
Оптический фильтр
Фотоприемник
Генератор масштабной частоты
Фазометр
Усилитель
Индикатор дальности
Расстояние


Погрешность определяется всеми измеренными величинами

Примеры:
He-Ne, 50 мВт, 30 МГц, 10 км: точность – несколько см
0,9 мкм , 3..120км: -10м; 0..3км: -1см
Рубиновый лазер, 1Дж, 5..8, <10нс – фронт, 24..30нс – длительность углов. Отражатель: 4,5м при работе со спутниками
Доплеровское изменение скорости

1*:


 -
поперечное сечение
-
поперечное сечение