

Приложение 1
Перечень вопросов для подготовки студентов к экзамену на 3 листах Идентификация систем
Представление линейных систем, наблюдаемость систем.
Система - это объект, в котором происходит взаимодействие между разнотипными переменными, и формируются наблюдаемые сигналы.
Интересующие нас наблюдаемые сигналы обычно называют выходными сигналами. Все остальные сигналы называют возмущениями, причем возмущения могут быть разбиты на два класса: измеряемые непосредственно и доступные лишь косвенной оценке по воздействию, оказываемому ими на выходной сигнал. С точки зрения описания объекта разница между входными сигналами и измеряемыми возмущениями (помехами) часто оказывается несущественной. См. рис. 1.1.
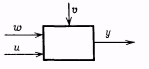
Рис. 1.1. Система с выходным сигналом у, входным сигналом u,
измеряемой помехой w и неизмеряемой помехой v.
Очевидно, что понятие системы сформулировано достаточно общо, поэтому не удивительна та важная роль, которую оно играет в современной науке. В рамках системного подхода решаются самые разнообразные задачи. Не пытаясь дать общего определения системы, проиллюстрируем это понятие на нескольких примерах.
Пример 1.1. Дом с солнечным подогревом
Принцип функционирования системы основан на том, что солнечные лучи разогревают воздух в солнечной панели, представляющей собой набор прозрачных трубок. Этот воздух подается в тепловой аккумулятор, в качестве которого используется заполненный камнями ящик. Накапливаемая тепловая энергия может использоваться для отопления дома. Интерес представляет вопрос, какое влияние оказывают на температуру аккумулятора изменения солнечного излучения и скорости поддува. Структурная системы изображена на рис. 1.3, а на рис. 1.4 показаны записи данных наблюдений в течение 16 часов. Замеры производились каждые 10 мин.
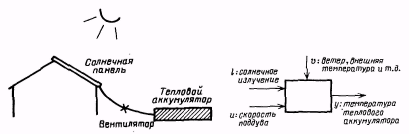
Рис. 1.2. Дом с солнечным подогревом Рис. 1.3. Система дома с солнечным
подогревом:
u - входной сигнал;
l - измеряемая помеха;
y – выходной сигнал;
v - неизмеряемая помеха;
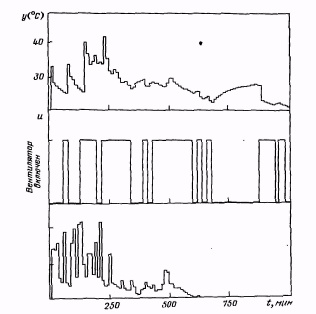
Рис. 1.4. Температура теплового аккумулятора y, скорость поддува u, интенсивность солнечного излучения l за 16-часовой отрезок времени. Интервал между замерами - 10 мин.
Наблюдатели
Во многих задачах теории систем и теории управления полное описание свойств помехи в уравнении (1) не используется. Вместо этого работают со свободной от шумов, или детерминированной, моделью:
y(t) = G(q)u(t). (27)
Однако в этом случае следует помнить, что уравнение (27) не отражает всех входо-выходных особенностей системы.
Конечно, модель (27) также можно использовать для "расчета", "выдвижения гипотез" и "прогнозирования" будущих значений выходного сигнала. Однако в отсутствии модели шума остается свобода в выборе наилучшего способа употребления модели (27). При этом ключевым моментом оказывается введение концепции наблюдателей. Обычно эта концепция трактуется в терминах моделей в пространстве состояний для описания (27).
Пример 2.3. Пусть
![]() (28)
(28)
Это означает, что входо-выходное соответствие можно представить уравнением
![]() ,
(29)
,
(29)
![]() ,
,
либо уравнением
![]() .
(30)
.
(30)
Теперь, если заданы описания (27) и (28) и данные у(s), и(s) (s t - 1) и требуется рассчитать возможное значение сигнала у(t), то можно воспользоваться формулой
![]() (31)
(31)
или формулой
![]() .
(32)
.
(32)
Пока данные и описания системы правильны, между соотношениями (31) и (32) разницы нет: каждое из лих является "наблюдателем" (в нашем случае более уместно было бы говорить «предсказателем») системы. Возможность выбора между этими соотношениями может быть связана с дифференциацией степени их чувствительности к неточностям в данных и самих описаниях. Так, например, если нет данных о значениях входных и выходных сигналов до момента s = 0, то ошибка уравнения (31) является величиной, убывающей как at, а уравнение (32) при t 0 остается точным. Как только описание (27) дополняется моделью шума типа (1), выбор предсказателя становится единственным.