

24 Вопрос. Парабола.
ОПРЕДЕЛЕНИЕ
П араболой
называется геометрическое место точек
на плоскости, каждая из которых
равноудалена от данной точки, называемой
фокусом,
и данной прямой, называемой директрисой
(предполагается, что эта прямая не
проходит через фокус
араболой
называется геометрическое место точек
на плоскости, каждая из которых
равноудалена от данной точки, называемой
фокусом,
и данной прямой, называемой директрисой
(предполагается, что эта прямая не
проходит через фокус
Вывод уравнения параболы
Согласно определению параболы:
FM = KM
О![]() пределяя
FM и КМ по формуле расстояния между двумя
точками, получим:
пределяя
FM и КМ по формуле расстояния между двумя
точками, получим:

К![]() аноническое
уравнение параболы
аноническое
уравнение параболы
у2 = 2рх (3)
Уравнение (3) называется каноническим уравнением параболы.
Д![]()
![]() ля
определения вида параболы найдем у
из канонического уравнения параболы
ля
определения вида параболы найдем у
из канонического уравнения параболы
Д иректрисса
параболы имеет уравнение
иректрисса
параболы имеет уравнение
26 Вопрос. N-мерное линейное векторное пространство
Векторное пространство R, называется n-мерным, если в нем существует n линейно независимых векторов, а любые n+1 векторов уже являются зависимыми.
Число n называется размерностью векторного пространство R и обозначается dim(R).
Совокупность n линейно независимых векторов n-мерного пространства R называется базисом.
Теорема. Каждый вектор Х векторного пространства R можно представить, и притом единственным способом, в виде линейной комбинации векторов базиса.
27 Вопрос. Системы векторов, операции над ними.
N-мерным вектором называется упорядоченная совокупность n действительных чисел, записываемых в виде Х=(х1,х2,…хn) , где хi – i-я компонента вектора Х.
Два n-мерных вектора равны тогда и только тогда, когда равны их соответствующие компоненты, т.е. Х=У, если xi=yi, i=1…n.
Суммой двух векторов одинаковой размерности n называется вектор Z=X+Y, компоненты которого равны сумме соответствующих компонент слагаемых векторов, т.е. zi=xi+yi , i=1…n.
Произведением вектора Х на действительное число λ называется вектор V=λX, компоненты которого равны произведению λ на соответствующие компоненты вектора Х, т.е. vi=λxi , i=1…n.
Линейные операции над векторами удовлетворяют следующим свойствам:
Х + У = У + Х;
(Х + У) + Z = X + (Y + Z);
a(bX) = (ab)X;
a(X + Y) = aX + aY;
(a + b)X = aX + bX;
Существует нулевой вектор О=(0,0,…0) такой, что Х + О = Х, для любого Х;
Для любого вектора Х существует противоположный вектор (-Х) такой, что Х + (-Х) = О;
1∙Х = Х для любого Х.
Определение Множество векторов с действительными компонентами, в котором определены операции сложения векторов и умножения вектора на число, удовлетворяющие приведённым выше свойствам, называется векторным пространством.
28 вопрос. Ранг матрицы
В матрице размера m x n вычеркиванием каких-либо строк и столбцов можно выделить квадратные подматрицы k-го порядка, где k≤min(m; n). Определители таких подматриц называются минорами k-го порядка матрицы А.
Рангом матрицы А называется наивысший порядок отличных от нуля миноров этой матрицы.
Ранг матрицы А обозначается rang A или r(A).
Из определения следует:
1) ранг матрицы размера m x n не превосходит меньшего из её размеров, т.е. r(A) ≤ min (m; n).
2) r(A)=0 тогда и только тогда, когда все элементы матрицы равны нулю, т.е. А=0.
3) Для квадратной матрицы n-го порядка r(A) = n тогда и только тогда, когда матрица А – невырожденная.
В общем случае определение ранга матрицы перебором всех миноров достаточно трудоемко. Для облегчения этой задачи используются элементарные преобразования, сохраняющие ранг матрицы:
1) Отбрасывание нулевой строки (столбца).
2) Умножение всех элементов строки (столбца) матрицы на число, не равное нулю.
3) Изменение порядка строк (столбцов) матрицы.
4) Прибавление к каждому элементу одной строки (столбца) соответствующих элементов другой строки (столбца), умноженных на любое число.
5) Транспонирование матрицы.
Теорема. Ранг матрицы не изменится при элементарных преобразованиях матрицы.
2![]() 9
вопрос. Линейные операторы и матрицы
9
вопрос. Линейные операторы и матрицы
О
![]() пределение.
Если задан закон (правило), по которому
каждому вектору x
пространства ставится в соответствие
единственный вектор y
пространства то говорят: что задан
оператор (преобразование, отображение)
A(x),
действующий из в и
пределение.
Если задан закон (правило), по которому
каждому вектору x
пространства ставится в соответствие
единственный вектор y
пространства то говорят: что задан
оператор (преобразование, отображение)
A(x),
действующий из в и
записывают y=A(x).
Оператор называется линейным, если для любого вектора x и y пространства
и![]() любого числа λ выполняются следующие
соотношения:
любого числа λ выполняются следующие
соотношения:
![]()
![]()
М![]()
![]() атрица
называется
матрицей оператора в базисе
, а ранг r
матрицы - рангом оператора .
атрица
называется
матрицей оператора в базисе
, а ранг r
матрицы - рангом оператора .
Т![]() аким
образом, каждому линейному оператору
соответствует матрица в данном базисе.
Справедливо и обратное: Всякой матрице
n-го
порядка соответствует оператор n-мерного
пространства.
аким
образом, каждому линейному оператору
соответствует матрица в данном базисе.
Справедливо и обратное: Всякой матрице
n-го
порядка соответствует оператор n-мерного
пространства.
С вязь между вектором х и его образом можно выразить в матричной форме:
где - матрица линейного оператора,
![]()
О![]()
![]()
![]() пределим
действия над линейными операторами:
пределим
действия над линейными операторами:
1
 .
Суммой двух линейных операторов и
называется оператор определяемый
равенством
.
Суммой двух линейных операторов и
называется оператор определяемый
равенством
2
 .
Произведением линейного оператора
на число λ называется оператор
определяемый .
.
Произведением линейного оператора
на число λ называется оператор
определяемый .П
 роизведением
линейных операторов и называется
оператор определяемый
роизведением
линейных операторов и называется
оператор определяемый
О


 пределим
нулевой оператор переводящий все
векторы пространства в нулевые
вектора
пределим
нулевой оператор переводящий все
векторы пространства в нулевые
вектора
и тождественный оператор действующий по правилу
Теорема Матрицы А и А* линейного оператора в базисах е1,е2, ..еn и е1*,е2*, ..еn* связаны соотношением А*=С-1АС,
где С – матрица перехода от старого базиса к новому.
33 вопрос. Решение системы линейных уравнений методом Гаусса
М етод
Гаусса –
метод последовательного исключения
переменных – заключается в том, что с
помощью элементарных преобразований
система уравнений приводится к
равносильной системе ступенчатого или
треугольного вида.
етод
Гаусса –
метод последовательного исключения
переменных – заключается в том, что с
помощью элементарных преобразований
система уравнений приводится к
равносильной системе ступенчатого или
треугольного вида.
Рассмотрим матрицу:
эта матрица называется расширенной матрицей системы (1), так как в нее кроме матрицы системы А, дополнительно включен столбец свободных членов.
П р и м е р 2. Методом Гаусса решить систему:
![]()
Р е ш е н и е. Прямой ход метода Гаусса.
Запишем расширенную матрицу системы,
и с помощью элементарных преобразований
приведём матрицу к треугольному виду:
1. Поменяем местами 1-ю и 2-ю строки.
2. 1-ю строку умножим на (-3) и прибавим ко 2-й,
потом 1-ю умножим на (-2) и прибавим к 3-й.
3. 3-ю строку умножим на (-4) и прибавим ко 2-й,
получим эквивалентную матрицу.
4 .
3-ю строку разделим на 13.
.
3-ю строку разделим на 13.
 Обратный
ход метода Гаусса
Обратный
ход метода Гаусса
34 вопрос. Задачи линейного программирования
Общая задача линейного программирования имеет вид:

Линейная функция называется целевой функцией задачи. Все остальное, за исключением условий неотрицательности переменных xj, - ограничения.
35 вопрос. Теория двойственности
Двойственная задача- это вспомогательная задача ЛП, получаемая с помощью определенных правил непосредственно из условий исходной задачи
1. Если целевая функция f исходной задачи максимизируется, то целевая функция z двойственной задачи – минимизируется и наоборот.
2. Количество ограничений (m) исходной задачи равно количеству переменных двойственной задачи, а количество переменных (n) исходной задачи равно количеству ограничений двойственной.
Переменные двойственной задачи обозначим yi (i=1,2, m).
3. Поскольку переменные исходной задачи связаны с ограничениями двойственной, то каждой переменной xj 0 соответствует в двойственной задаче ограничения вида « » (f→max) или « » (f→min) и наоборот.
4. Каждой переменной xj неограниченной по знаку, соответствует ограничение вида «=» двойственной задачи, и наоборот.
5. Свободные члены ограничений исходной задачи bi (i=1,2..m) в двойственной задаче являются коэффициентами при переменных yi (i=1,2, m) в целевой функции z . Коэффициенты cj (j=1,2 n) при переменных xj (j=1,2 n) в целевой функции исходной задачи являются свободными членами ограничений двойственной.
6. Матрица А коэффициентов при неизвестных в ограничениях исходной задачи в двойственной задаче транспонируется АТ.
36 вопрос. Графическое решение задачи линейного программирования
Исходная задача |
1. Максимизация функции f |
2.Количеcтво ограничений m |
3.Переменные xj (j=1,2 n) i-ое ограничение вида « » хj не ограничено по знаку i-ое ограничение вида «=» |
4. Свободные члены ограничений bi Коэффициенты при xj в целевой функции cj |
5.Матрица коэффициентов при неизвестных в ограничениях (А) |
Двойственная задача |
1.Минимизация функции z |
2. Количество переменных |
3. Количеcтво ограничений n j-ое ограничение вида « » j-ое ограничение вида «=» уi не ограничено по знаку |
4. Коэффициенты при yi в целевой функции z (bi) Свободные члены ограничений (cj) |
5. Транспонированная матрица коэффициентов при неизвестных в ограничениях (АТ). |
37 вопрос. Симплексный метод
Для решения задачи симплекс-методом необходимо привести её к каноническому виду и определить исходное допустимое базисное решение. Отталкиваясь от этого решения с помощью алгоритма симплекс-метода приходят к оптимальному решению или выводу о том, что задача не имеет решения.
Алгоритм симплекс-метода
1. Приводим задачу к каноническому виду.
2. Выбираем базисные переменные. У базисных переменных должен быть единичный вектор-столбец.
3![]() .
Полагая небазисные переменные равные
нулю, находим значения базисных
переменных. Это будет первое базисное
решение
.
Полагая небазисные переменные равные
нулю, находим значения базисных
переменных. Это будет первое базисное
решение
и значение целевой функции f.
4.Составляем таблицу.
Если в нулевой строке все коэффициенты при небазисных переменных , то найденное решение оптимально. В противном случае для нахождения нового базисного решения необходимо выбрать переменную вводимую в базис (т.е. выбрать ведущий столбец) и переменную выводимую из базиса (т.е. выбрать ведущую строку).
5. Для выбора ведущего столбца ( переменной вводимой в базис) среди коэффициентов небазисных переменных в 0-ом уравнении (в целевой функции) выбираем наименьший, и эту переменную вводим в базис.
Для выбора переменной выводимой из базиса (выбор ведущей строки) рассматриваем положительные отношения столбца свободных членов к ответствующим элементам ведущего столбца. Строка, отвечающая наименьшему отношению будет ведущей.
6. Из уравнения, отвечающего ведущей строке, находим выражение для переменной вводимой в базис и подставляем его в остальные уравнения.
7. В результате получилась новая система уравнений, и процесс повторяется.
38 вопрос. Транспортная задача
Пусть имеется m поставщиков А1, А2, …Аm однородного груза в количества а1, а2, аm единиц и n потребителей В1, В2, …Вn этого груза, потребность которых составляет соответственно в1,в2, вn единиц.
Известны стоимости перевозок единицы груза от i-го поставщика к j-му потребителю
сij (i=1, 2,…m, j=1,2,…n).
Требуется составить такой план перевозок, который обеспечит минимальные транспортные расходы.
Исходные данные транспортной задачи записываются в виде таблицы
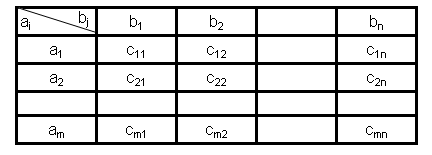
Переменные хij (i=1, 2,…m, j=1,2,…n) – объемы перевозок
от каждого от i-го поставщика к j-му потребителю.
Эти переменные могут быть записаны в виде матрицы перевозок.

М![]() атематическая
модель транспортной задачи
атематическая
модель транспортной задачи
![]()
![]()
![]()
Целевая функция задачи (А) выражает требование обеспечить минимум суммарных затрат на перевозку всех грузов.
Группа из m уравнений (В) описывает тот факт, что запасы всех m поставщиков вывозятся полностью.
Группа из n уравнений (С) выражает требование полностью удовлетворить запросы всех n потребителей.
Неравенство (D) является условиями неотрицательности всех переменных задачи.
Таким образом математическая формулировка транспортной задачи состоит в следующем:
Найти матрицу Х =( хij ) i=1, 2,…m, j=1,2,…n, элементы которой удовлетворяют системе ограничений (В) и (С), условиям неотрицательности (D) и обеспечивают минимум целевой функции (А).
В рассматриваемой модели транспортной задачи предполагается, что суммарные запасы поставщиков равны суммарным запросам потребителей т.е
Такая задача называется задачей с правильным балансом, а её модель закрытой. Если это равенство не выполняется, то модель называется задачей с неправильным балансом, а её модель – открытой.