

7 Проверка предварительно выбранного двигателя по нагреву и перегрузке
Проверку двигателя по нагреву произведем по рекомендациям, изложенным в [6], по методу эквивалентного момента. По этой методике эквивалентный момент Mэкв за полный цикл работы не должен превышать номинального момента двигателя Мн.
![]() .
(7.1)
.
(7.1)
Эквивалентный момент двигателя Mэкв за полный цикл работы определяем как

 ,
(7.2)
,
(7.2)
где Мр1, Мр2, Мр3, Мрn - рабочие моменты двигателя на первом, втором, третьем, четвертом (Рисунок 10) участках времени (Н.м);
t1, t2, t3, tn - длительность первого, второго, третьего, четвертого участка (с).
Для определения рабочих моментов в момент пуска двигателя, разобьем кривую изменения момента на прямолинейные участки как это показано на рисунке 10.
Рисунок 10 Замена криволинейного графика нагрузки при пуске отрезками прямой
 Тогда
рабочий момент на первом участке Мp1n
определим
как
Тогда
рабочий момент на первом участке Мp1n
определим
как
![]() Н.м
(7.3)
Н.м
(7.3)
Аналогичным образом по формуле (7.3) находим рабочие моменты для других участков при пуске. Для второго и третьего участков:
![]() Н.м
(7.4)
Н.м
(7.4)
Для четвертого участка:
![]() Н.м
(7.5)
Н.м
(7.5)
Для определения рабочих моментов при торможении двигателя, также разобьем кривую изменения момента на прямолинейные участки, как это показано на рисунке 11.
Рисунок 11 Замена криволинейного графика нагрузки при торможении отрезками прямой
По рисунку (12)
определяем:
![]() с,
с,
![]() с,
с,
![]() с,
с,
![]() с,
с,
![]() Н.м,
Н.м,
![]() Н.м,
Н.м,
![]() Н.м,
Н.м,
![]() Н.м,
Н.м,
![]() Н.м.
Н.м.
Тогда по формуле (7.3) находим рабочие моменты на участках торможения:
![]() Н.м
Н.м
![]() Н.м
Н.м
![]()
 Н.м
Н.м
![]() Н.м
Н.м
Для рассматриваемого цикла формула (7.2) примет вид

![]() .
(7.6)
.
(7.6)
Подставляя числовые значения в формулу (7.6) получим следующее значение эквивалентного момента Mэкв
![]()
![]() Н.м
Н.м
Полученный эквивалентный момент не превышает номинального момента электродвигателя, равного 890 Н.м.
Осуществим проверку электродвигателя по допустимой перегрузке по методике, изложенной в [6]. Для асинхронного электродвигателя максимальный статический момент на валу не должен превышать критического момента двигателя. Для заданной нагрузочной диаграммы максимальный статический момент на валу электродвигателя равен моменту Мс3. Тогда получим следующее неравенство
![]() .
(7.7)
.
(7.7)
Определим перегрузочную способность электродвигателя при моменте Мс3
![]() .
(7.8)
.
(7.8)
Из последнего выражения видно, что электродвигатель имеет незначительный запас по перегрузочной способности.
8 Выбор резисторов
Выбор пусковых
резисторов произведем по методике,
изложенной в [3]. Основным параметром
при выборе резисторов является
эквивалентный длительный ток по перегреву
![]() ,
который для повторно-кратковременного
режима определяется как
,
который для повторно-кратковременного
режима определяется как

 ,
(8.1)
,
(8.1)
где
![]() - рабочий ток на интервале времени работы
резистора (А),
- рабочий ток на интервале времени работы
резистора (А),
![]() - интервал времени,
когда через резистор протекает ток (с),
- интервал времени,
когда через резистор протекает ток (с),
Т - поcтоянная времени нагрева резистора (с),
ПВ - продолжительность включения резистора.
Также эквивалентный длительный ток можно определить графическим методом, какой используется в дальнейшем.
Так как резисторы используются как пусковые и тормозные, то максимальная продолжительность включения для них определяется по формуле
![]() .
(8.2)
.
(8.2)
Предполагаем для установки ящики №55 с чугунными элементами, которые имеют следующие основные параметры:
- сопротивление элемента – 0.055 Ом;
- длительный ток – 64 А;
- постоянная времени нагрева – 408 с;
-число элементов – 20шт..
Отношение рабочего периода к постоянной времени:
![]() =0.0027.
(8.3)
=0.0027.
(8.3)
По методике,
изложенной в[3], для условий tp/T=0.0027 и
ПВ=2.5% находим отношение
![]() :
:
![]() .
(8.4)
.
(8.4)
Откуда искомый эквивалентный по нагреву ток равен:
![]() А.
(8.5)
А.
(8.5)
Полученный эквивалентный ток не превышает длительного допустимого тока элемента (64 А). Поэтому выбранный элемент можно использовать в качестве пусковых и тормозных резисторов.
Исходные данные для составления секций были определены в пункте 3 и 4. Сопротивления ступеней составляют соответственно:
- первой ступени
![]() Ом;
Ом;
- второй ступени
![]() Ом;
Ом;
- третьей ступени
![]() Ом;
Ом;
- при динамическом
торможении будем использовать резисторы
всех трех ступеней общим сопротивлением
![]() Ом.
Ом.
 Для
первой ступени соединим три элемента
последовательно:
Для
первой ступени соединим три элемента
последовательно:

Для второй ступени возьмем один элемент.
Чтобы получить заданное сопротивление третьей ступени, соединим два элемента параллельно:
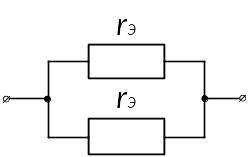
В этом случае сопротивление её будет равно
![]() Ом.
(8.6)
Ом.
(8.6)
Составим схему соединения секций – рисунок 12. Составим таблицу 11, куда внесем требуемые и полученные сопротивления и определим их расхождение.
Для сборки данной схемы нам понадобится 18 элементов. Ящик содержит 20 элементов, следовательно комплект сопротивлений будет состоять только из одного ящика.

 Рисунок
12 Схема соединения обмоток
Рисунок
12 Схема соединения обмоток
Таблица 11
Ступень |
Сопротивление, Ом |
||
требуемое |
подобрано |
отклонение, % |
|
|
0.15 |
0.165 |
10 |
|
0.061 |
0.55 |
10 |
|
0.025 |
0.028 |
12 |
Всего |
0.236 |
0.248 |
5.1 |
Подобранные значения сопротивления отличаются от рассчитанных, но это позволяет снизить габариты, массу и стоимость электропривода.