

4 Расчет схемы динамического торможения
Расчет схемы динамического торможения будем производить, основываясь на рекомендациях, изложенных в [3]. Так как двигатель питается от линейного напряжения 380 В и обмотки статора соединены по схеме звезда, то для динамического торможения выберем схему питания, изображенную на рисунке 3.
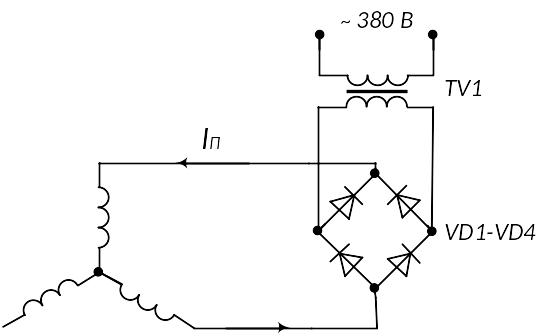
Рисунок 3 Схема питания обмотки статора при динамическом торможении
При динамическом торможении по обмоткам статора будет протекать постоянный ток Iп, равный номинальному току электродвигателя I1н. Тогда величина постоянного напряжения Uп на выходе выпрямительного моста, если пренебречь сопротивлением соединительных проводов, должна составлять
![]() В.
(4.1)
В.
(4.1)
Мощность P необходимую для торможения определим как
![]() Вт.
(4.2)
Вт.
(4.2)
Тогда мощность трансформатора в рассматриваемой схеме должна быть не менее
![]() В А.
(4.3)
В А.
(4.3)
По рассчитанным параметрам S и Uп по [4] выбираем трансформатор ближайшей большей мощности. Таким образом, выбираем однофазный трансформатор ОСМ1-2.5М со следующими параметрами:
- номинальное напряжение первичной обмотки U1=380 В;
- номинальное вторичное напряжение U2=24 В;
- полная номинальная мощность Sтр=2.5 кВ А.
В однофазной мостовой схеме максимальное обратное напряжение Uобр.м, прикладываемое к диоду и средний прямой ток Itav, составляют соответственно
![]() В.
В.
![]() А.
(4.4)
А.
(4.4)
По [5] выбираем диоды для схемы выпрямления которые могут пропускать в прямом направлении средний ток равный 85 А и выдерживать обратное напряжение не менее 34 В. Требуемыми параметрами обладают диоды Д141-100-3, у которых:
- выпрямленный ток в прямом направлении Itav=100 А;
- максимальное обратное напряжение Uобр.м=300 В;
- падение напряжения в прямом направлении Uпр=1.15 В.
Так как в мостовой однофазной схеме выпрямления одновременно работают два диода, то постоянное напряжение Uп на выходе моста будет равно
![]() В.
(4.5)
В.
(4.5)
Для уменьшения числа дополнительных резисторов в цепи ротора и упрощения схемы управления электроприводом, в качестве резистора динамического торможения будем использовать все три ступени пусковых сопротивлений. Тогда сопротивление резистора динамического торможения будет равно
![]() Ом.
(4.6)
Ом.
(4.6)
5 Расчет и построение электромеханических и механических характеристик электродвигателя
5.1 Естественная электромеханическая характеристика
Расчет естественной электромеханической характеристики будем производить по формуле, приведённой в [1]
![]() (5.1)
(5.1)
где U1ф - номинальное фазное напряжение (В);
r1 - активное сопротивление статора (Ом);
r2' - приведенное активное сопротивление ротора (Ом);
х2' - приведенное реактивное сопротивление ротора (Ом);
s - текущее значение скольжения.
Перевод значений скольжения в угловую скорость и частоту производим по формулам (3.2) и (3.3). Задаваясь значениями скольжения от нуля до единицы, находим соответствующие значения скорости и приведенного тока ротора. Результаты вычислений заносим в таблицу 3. По данным таблицы строим естественную механическую характеристику, которая приведена на рисунке 4.
Таблица 3
-
s
I, А
ω, рад/с
0,00
0,00
104,72
0,05
204,05
99,48
0,10
348,92
94,24
0,15
440,28
89,00
0,20
497,13
83,76
0,25
533,64
78,52
0,30
558,10
73,28
0,35
575,20
68,04
0,40
587,59
62,80
0,45
596,87
57,56
0,50
604,01
52,32
0,55
609,63
47,08
0,60
614,14
41,84
0,65
617,83
36,60
0,70
620,88
31,36
0,75
623,45
26,12
0,80
625,64
20,88
0,85
627,51
15,64
0,90
629,14
10,40
0,95
630,56
5,16
1,00
631,81
0,00
Рисунок 4 Естественная электромеханическая характеристика двигателя