

48. Уравновешивание роторов.
Известно, что звенья машин совершают поступательное, вращательное, Плоскопа-раллельное и др. движения. Рассмотрим звено, соверша-ющее вращательное движе-ние (ротор). Пусть в качестве ротора будет диск (рис. 8.2) и
пусть
центр масс этого диска не лежит на оси
вращения

Д
– смещение центра масс. Ус-корение
смещенного центра масс S диска:
 Сила инерции:
Сила инерции:
![]() Эта сила
передается на подшипники, фундаментные
болты и является, по сути, воз-мущающей
силой, поскольку ее вертикальная и
горизон-
Эта сила
передается на подшипники, фундаментные
болты и является, по сути, воз-мущающей
силой, поскольку ее вертикальная и
горизон-
тальная
составляющие перио-дически изменяются.
![]()
Возмущающая
сила вызывает вибрации, которые в случае
рез-онанса могут приводить к
печа-льным последствиям. Чтобы
ней-трализовать силу инерции
![]() диск нужно уравновесить. На линии ОS
с противоположной стороны за точкой О
закрепить противовес с массой
диск нужно уравновесить. На линии ОS
с противоположной стороны за точкой О
закрепить противовес с массой
![]() ,
кото-рый бы создал силу инерции, ра-вную
.
,
кото-рый бы создал силу инерции, ра-вную
.![]()
![]() Геометрически
должно быть:
Геометрически
должно быть:
![]() Т.е. сумма статических масс диска и
противовеса должна быть равна нулю. При
этом
Т.е. сумма статических масс диска и
противовеса должна быть равна нулю. При
этом
центр
О и центр S
совпадут в точке О т.к. условию равенства
нулю статических моментов масс подчиняется
лишь центр этих масс. Иначе говоря, центр
масс должен лежать на оси вращения.

При этом центры масс полуди-сков расположены в разных пло-скостях и их силы инерции созда-ют неуравновешенную пару с плечом h. Уравновешивание этой пары называется динамическим и может быть произведено про-тивовесами, которые будут соз-давать пару, которая будет ле-жать в плоскости действия ре-зультирующей пары сил инер-ции. Уравновешивание момента называется динамическим. В об-щем случае вращающегося вала, когда он несёт на себе множе-ство неуравновешенных масс, расположенных произвольно с разным дисбалансом, приходит-ся уравновешивать иглавный вектор и главный момент. При этом требуется три противовеса. Один из них
(для уравновешивания глав-ного вектора) можно располо-жить в плоскости действия одного из противовесов для уравновешивания главного момента. Складывая силы ин-рции, двух противовесов, установленных в одной плос-кости, результирующую этих сил получим
одним
противовесом, закреп-лённым в точке
пересечения составляющих сил. Таким
об-разом, для полного уравно-вешивания
ротора требуется два противовеса.
Уравнения для их определения имеют
следующий вид:
![]()
Полученные уравнения пока-зывают, что условием полного уравновешивания ротора (ва-ла) является условие, что ось его вращения является глав-ной центральной осью ине-рции.
49. Полное статическое уравновешивание меха-низмов.
Существует
множество мето-дов статического
уравнове-шивания.По методу главных
точек, каждый вектор в урав-нении (1)
рассматривают как сумму векторов,направленных
как звенья.Например, для ша-рнирного
четырёхзвенника имеем:
![]()
![]() Таким образом,
уравнение можно представить как:
Таким образом,
уравнение можно представить как:

 Сгруппируем
однонаправле-нные векторы:
Сгруппируем
однонаправле-нные векторы:
![]()
где
![]() —
векторы главных точек (направлены как
звенья). Их модули:
—
векторы главных точек (направлены как
звенья). Их модули:
 С помощью векторов
С помощью векторов
![]() упрощается зада-ча определения положения
центра масс механизма, пос-кольку векторы
эти во всех по-ложениях механизма имеют
одинаковый модуль, а направ-ление — по
звеньям.
упрощается зада-ча определения положения
центра масс механизма, пос-кольку векторы
эти во всех по-ложениях механизма имеют
одинаковый модуль, а направ-ление — по
звеньям.
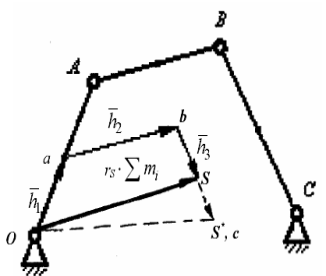 Модули
векторов
Модули
векторов![]() состав-ляются
по определенному алгоритму. Они
представляют собой сумму статических
мо-ментов двух масс относитель-но начала
звена, которому вектор h
параллелен:
первая масса
— собственная масса звена, приложенная
в центре его масс, вторая — сумма масс
последующих звеньев, прило-женная в
конце звена.
состав-ляются
по определенному алгоритму. Они
представляют собой сумму статических
мо-ментов двух масс относитель-но начала
звена, которому вектор h
параллелен:
первая масса
— собственная масса звена, приложенная
в центре его масс, вторая — сумма масс
последующих звеньев, прило-женная в
конце звена.