

22. Кинематика планетарной передачи
Планетарные механизмы получаются из дифференциальных путём закрепления одного из центральных колёс.
Д![]()
 ля
передачи, изображенной на рис. 1.1., имеем:
передаточное отношение при
ля
передачи, изображенной на рис. 1.1., имеем:
передаточное отношение при 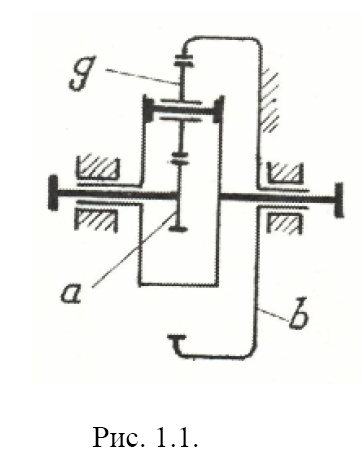
передаточное отношение планетарной передачи :
![]()
у гловые
скорости звеньев:
гловые
скорости звеньев:
Планетарные механизмы применяют для получения больших передаточных отношений.
Р![]() ассмотрим
другой вид планетарной передачи: Для
передачи, приведенной на рис. 1.2, имеем
передаточное отношение при
ассмотрим
другой вид планетарной передачи: Для
передачи, приведенной на рис. 1.2, имеем
передаточное отношение при
![]() :
:
передаточное
отношение планетарной передачи:
![]()
угловые скорости звеньев:
![]()
![]()
23. Кинематика дифференциального механизма
Н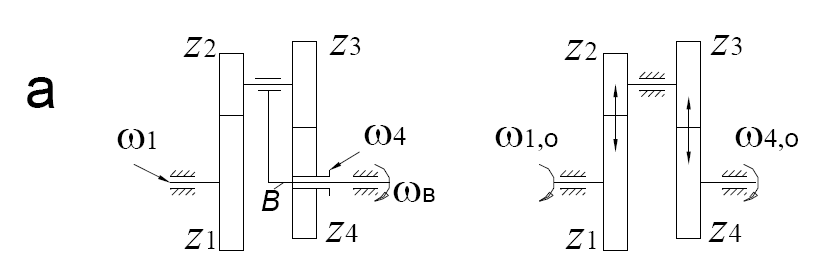 а
рис. 4 показаны дифференциальные
механизмы: а, б – с цилиндрическими
колесами, в, г – с коническими колесами.
Последний дифференциальный механизм
называют коническим
дифференциалом.
В этих механизмах должны быть заданы
два независимых движения, чтобы третье
движение было определенным, например,
ω1 и ω2 – заданные движения ведущих
звеньев, ωВ – зависимое движение ведомого
звена – водила. Определение угловой
скорости ведомого звена при заданных
движениях ведущих звеньев производят
обычно с помощью обращенного движения.
Сущность этого способа заключается в
следующем. 1. Дадим всему механизму
угловую скорость, равную скорости
водила, но противоположно направленную
(–ωВ). Получим обращенный механизм. На
рис. 4 рядом с дифференциальными
механизмами справа показаны их обращенные
механизмы, для которых:
а
рис. 4 показаны дифференциальные
механизмы: а, б – с цилиндрическими
колесами, в, г – с коническими колесами.
Последний дифференциальный механизм
называют коническим
дифференциалом.
В этих механизмах должны быть заданы
два независимых движения, чтобы третье
движение было определенным, например,
ω1 и ω2 – заданные движения ведущих
звеньев, ωВ – зависимое движение ведомого
звена – водила. Определение угловой
скорости ведомого звена при заданных
движениях ведущих звеньев производят
обычно с помощью обращенного движения.
Сущность этого способа заключается в
следующем. 1. Дадим всему механизму
угловую скорость, равную скорости
водила, но противоположно направленную
(–ωВ). Получим обращенный механизм. На
рис. 4 рядом с дифференциальными
механизмами справа показаны их обращенные
механизмы, для которых:
ω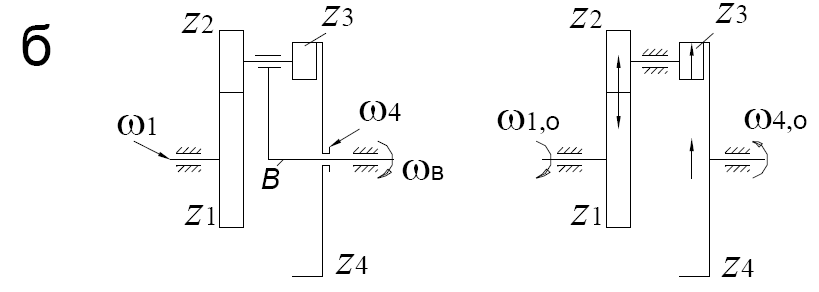 1,о
= ω1 – ωв, ωв,о = ωв – ωв =0,
1,о
= ω1 – ωв, ωв,о = ωв – ωв =0,
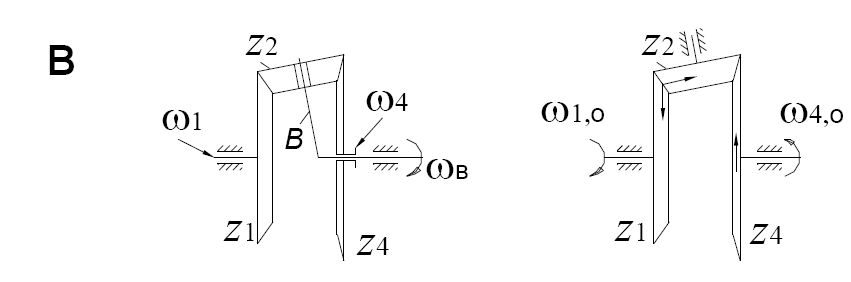 ω4,о = ω4 – ωв, т.
е. в обращенном механизме водило
неподвижно (и не изображается). Здесь
ω1,О , ωВ,О ,
ω4,О – скорости
звеньев обращенного механизма. 2. Для
обращенного механизма определим
передаточное отношение между двумя
звеньями: первым и последним, в данных
механизмах – четвертым.
ω4,о = ω4 – ωв, т.
е. в обращенном механизме водило
неподвижно (и не изображается). Здесь
ω1,О , ωВ,О ,
ω4,О – скорости
звеньев обращенного механизма. 2. Для
обращенного механизма определим
передаточное отношение между двумя
звеньями: первым и последним, в данных
механизмах – четвертым.
П ередаточное
отношение обращенного механизма будем
помечать дополни-
ередаточное
отношение обращенного механизма будем
помечать дополни-
т ельным
индексом «о». С учетом (1) запишем
ельным
индексом «о». С учетом (1) запишем
В этом выражении показатель степени «k» определяет знак передаточного
отношения i1-4,о , который необходимо учитывать. На рис. 4а звенья 1 и 4 в об-
ращенном механизме вращаются в одну сторону, k = 2, передаточное отношение считается положительным. На рис. 4б звенья 1 и 4 вращаются в разные стороны, k = 1 и передаточное отношение считается отрицательным. Направление движения звеньев в обращенных механизмах определяется по «правилу стрелок». Стрелки на колесах показывают направление перемещения расположенных ближе к наблюдателю зубьев колес. Для цилиндрических дифференциальных механизмов показатель степени «k» можно считать равным числу внешних зацеплений, поскольку внешнее зацепление изменяет направление вращения, тогда как внутреннее – не изменяет (рис. 1). Из выражения (2) определяется неизвестное движение дифференциального механизма ωВ.
Аналогично определяется скорость ω4 при заданных ω1, ωВ и скорость
ω1 – при заданных ω4, ωВ. Следует помнить, что заданные угловые скорости
подставляются в выражение (2) со своими знаками. Для конического дифференциала (рис. 4г) выполняется следующее конструктивное условие: z1 = z4, z2 = z3. Колесо z3 необходимо здесь для уравновешивания вращающихся масс и разгрузки валов и опор от сосредоточенных сил. Выражение (2) преобразуется в следующее:

Полученная формула показывает, что конический дифференциал позволяет механически производить операцию сложения или вычитания скоростей.