

21 .Назначение, виды и устройство эпициклических зубчатых механизмов.
Эпициклические зубчатые механизмы бывают дифференциальными, планетарными и замкнутыми дифференциальными. Эпициклические зубчатые механизмы , т е зубчатые механизмы , в составе которых имеются подвижные оси зубчатых колёс со степенью подвижности , равной единице называются планетарными. Если степень подвижности эпициклического механизма больше единицы , то такой механизм называется дифференциальным (дифференциалом). В любом эпициклическом механизме в качестве звеньев используются только сателлиты , солнечные колёса и водила. Другие звенья образуют между собой кинематическую цепь, которая соединена с эпицеклическим механизмом. Ось вращения водилы всегда совпадает с осями солнечных колёс и называется центральной осью механизма Так как планетарные механизмы имеют степень подвижности равной единице, то они представляют собой обычные зубчатые механизмы с одним ведущим и одним ведомым звеном. Назначение планетарных механизмов – создавать требуемые передаточные отношения. Дифференциальные механизмы не имеют передаточного отношения так как при одном ведущем звене они обладают неопределённостью движений. Их назначение сложение и разделение движений.
А)Дифференциал предназначен для распределения крутящего момента между ведущими колесами и позволяет вращаться колесам с разными угловыми скоростями.
Дифференциалы по конструкции делятся на шестеренчатые, кулачковые и червячные.
Шестеренчатые дифференциалы по типу используемых зубчатых колес могут быть коническими и цилиндрическими.
По крутящим моментам на выходных валах дифференциалы делятся на симметричные (крутящий момент поровну распределяется между выходными валами) и несимметричные.
По распределению крутящего момента дифференциалы могут быть:
• с постоянным распределением — конические и цилиндрические;
• с непостоянным распределением — с принудительной блокировкой и самоблокирующиеся, а также пульсирующие, свободного хода (обгонные) и повышенного трения.
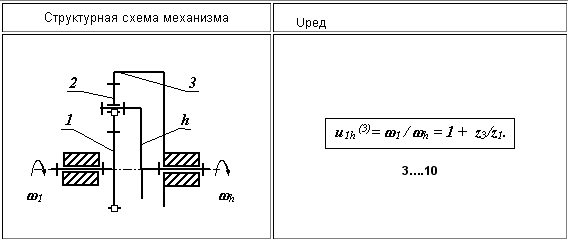
Б) К типовым планетарным механизмам относятся: 1) однорядный планетарный механизм; 2) двухрядный планетарный механизм с одним внешним и одним внутренним зацеплением; 3) двухрядный планетарный механизм с двумя внешними зацеплениями; 4)двухрядный планетарный механизм с двумя внутренними зацеплениями Элементы планетарного механизма имеют специальные названия
1)зубчатое колесо с внешними зубьями, расположенное в центре механизма называется “солнечным“; 2) колесо с внутренними зубьями называют “короной“ или “эпициклом“;
3) колеса, оси которых подвижны, называют “сателлитами“; 4) подвижное звено, на котором установлены сателлиты, называют “водилом“. Звено водила принято обозначать не цифрой, а латинской буквой h.
В) Замкнутые дифференциальные зубчатые механизмы представляют собой дифференциальный механизм, у которого между теми или иными двумя звеньями установлена кинематическая связь, например в виде фрикционной муфты. Связь снижает степень подвижности дифференциала до единицы. Замкнутые дифференциалы широко используются в коробках переменных передач.