

3.14.1 Регулирование частоты вращения сопротивлением в цепи якоря
Уравнения токов до и после введения сопротивления
 ,
,
 ,
откуда
,
откуда
 ,
т. е. ток
,
т. е. ток
 и момент уменьшается (
и момент уменьшается ( )
.
)
.
При этом
 и
скорость
уменьшается. С уменьшением скорости
ток якоря возрастает, и он достигнет
исходного тока якоря, но при меньшей
скорости
.
и
скорость
уменьшается. С уменьшением скорости
ток якоря возрастает, и он достигнет
исходного тока якоря, но при меньшей
скорости
.
Переходный процесс показан на рис. 50.
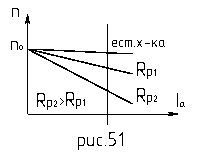
Регулирование частоты вращения сопротивлением в цепи якоря осуществляется в сторону уменьшения скорости, рис. 51.
Но так как ток
якоря протекает по Rр,
то увеличиваются общие потери, и снижается
кпд. При постоянном токе, за счет
увеличения падения напряжения
 ,
скорость двигателя уменьшается.
,
скорость двигателя уменьшается.
3.14.2 Регулирование частоты вращения за счет изменения потока
Т ок
якоря до и после изменения потока
ок
якоря до и после изменения потока
 ,
,
 ,
их отношение
,
их отношение
 .
Уравнение моментов
.
Уменьшим поток на
.
Уравнение моментов
.
Уменьшим поток на
 ,
т. е.
,
т. е.
 ,
,
 .
Напряжение примем за единицу, тогда
.
Напряжение примем за единицу, тогда
 .
.
Ток якоря
возрос в 3,3 раза, тогда
 ,
то
,
то
 и
и
 (возрастает).
Переходный процесс представлен на рис.
52.
(возрастает).
Переходный процесс представлен на рис.
52.
Ток
 .
С увеличением скорости вращения, ток
якоря будет уменьшаться, но он будет
больше исходного т. к. уменьшен поток.
.
С увеличением скорости вращения, ток
якоря будет уменьшаться, но он будет
больше исходного т. к. уменьшен поток.
П ри
уменьшении потока частота вращения
возрастает, рис 53.
ри
уменьшении потока частота вращения
возрастает, рис 53.
Рис. 53.
Как правило, регулирование частоты вращения изменением потока производят в сторону увеличения. В сторону уменьшения регулирование мало эффективно из-за насыщения магнитной цепи.
3.14.3 Регулирование частоты вращения изменением подводимого напряжения
Регулирование частоты вращения изменением подводимого напряжения производится следующими способами:
А) Система генератор-двигатель (Г-Д).
Б) Тиристорный преобразователь-двигатель (ТП-Д).
В) Широтно-импульсное регулирование.
А) Система Г-Д, рис.54.


Рис. 54.
Увеличивая ток возбуждения генератора iвг, возрастает поток Фг и Ег, а следовательно увеличивается напряжение на якоре двигателя и скорость возрастает. Регулирование происходит плавно при малых потерях энергии.
Эта система используется при большой мощности двигателя (подъёмники, прокатные станы, экскаваторы и т.д).
Б) Тиристорный преобразователь-двигатель.
В системе Г-Д используется большое число машин, что увеличивает стоимость установки и снижает надежность.
П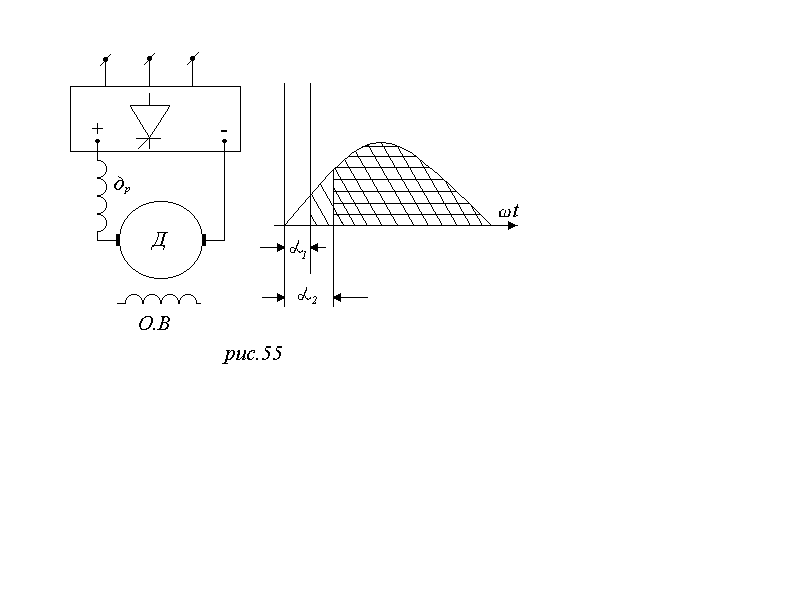 оэтому
в последнее время для регулируемого
напряжения все чаще используются
статические преобразователи, рис.55.
оэтому
в последнее время для регулируемого
напряжения все чаще используются
статические преобразователи, рис.55.
Рис. 55.
Увеличивая
угол управления
 - площадь полупериода уменьшается,
уменьшается среднее значение напряжения
- Uср, а следовательно
уменьшается скорость вращения.
- площадь полупериода уменьшается,
уменьшается среднее значение напряжения
- Uср, а следовательно
уменьшается скорость вращения.
В) Широтно-импульсное регулирование.
И дея
регулирования напряжения подводимого
к двигателю заключается в том, что,
изменяя длительность подключения
двигателя ключом (К) к сети, изменяется
среднее значение напряжения, рис. 56. В
качестве ключа используются схемы на
базе тиристоров или транзисторов.
дея
регулирования напряжения подводимого
к двигателю заключается в том, что,
изменяя длительность подключения
двигателя ключом (К) к сети, изменяется
среднее значение напряжения, рис. 56. В
качестве ключа используются схемы на
базе тиристоров или транзисторов.
Рис. 56.
Изменяя время импульса tи
изменяется скважность
 ,
,
где t4 - время импульса; tп - время паузы.
Среднее значение Uср=U0.
 .
.
Как видим, изменяя среднее значение напряжения, можно регулировать частоту вращения двигателя. Эта система широко используется вместо контактакторно-резисторных систем.