

III.1. Представление моделей объектов управления в пространстве состояний
Удобным и единообразным по форме является представление математической модели объекта в виде системы дифференциальных уравнений первого порядка, разрешенных относительно первых производных, т.е. уравнений в форме Коши. Для этого необходимо ввести дополнительные переменные, называемые переменными или координатами состояния объекта. Модель объекта в этом случае будет определяться через функциональную связь трех видов переменных: входных ui, выходных yi и внутреннего состояния хi.
 (3.1)
(3.1)
где FC и FB – функции состояния и выхода объекта;
U, X, Y – векторные величины, компонентами которых являются переменные ui, xi, yi.
Чтобы лучше разобраться в особенностях описания объекта через переменные состояния, рассмотрим уравнение первого порядка
 (3.2)
(3.2)
Введем обозначение y = x и представим уравнение (3.2) в форме (3.1.)

 (3.3)
(3.3)
 .
.
Структурная схема системы (3.3) представлена на рис. 3.1, а.
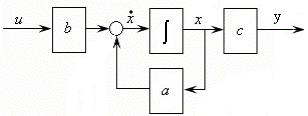
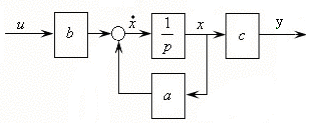
а)непосредственная форма описания б) символьная форма описания
Рис. 3.1.Структурная схема описания объекта регулирования первого
порядка с использованием переменной состояния х
Чаще всего операцию интегрирования всех структурных схем обозначают через оператор 1/р. (см. рис. 3.1, б) Объект, описываемый дифференциальным уравнением n-го порядка, через переменные состояния будет представляться
n- дифференциальными уравнениями первого порядка (в форме Коши)
 (3.4)
(3.4)
где х1, … хn – переменные или координаты состояния.
Кроме того, согласно (3.1), требуется уравнение выхода, которое в общем случае будет иметь следующий вид
 (3.5)
(3.5)
Уравнения (3.4) и (3.5) справедливы для объекта с одним входом и одним выходом, т.е. когда y, u – скалярные величины. Эти уравнения удобно представить в матричной форме (сводка обозначений и сведения из теории матриц даны в Приложении).
 (3.6)
(3.6)
 ,
,
где Т – знак транспонирования.
Система (3.6) может быть записана в сжатой форме
 (3.7)
(3.7)
где
 - векторная переменная, называемая
вектором состояния;
- векторная переменная, называемая
вектором состояния;
U, y – скалярные переменные;
А – квадратная матрица коэффициентов размерностью n x n;
B – матрица-столбец размерностью n x 1;
С – матрица-строка размерностью 1 х n.
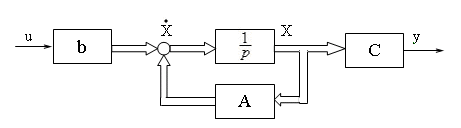
Рис. 3.2. Структурная схема описания n-ого объекта с
использованием вектора состояний Х
Матрица А называется переходной или собственной матрицей объекта, матрицы B и С соответственно – входной и выходной матрицами. Система (3.7) подобна по форме системе (3.3). Соответственно она имеет подобную структурную схему (рис. 3.2). Отличие заключается в замене скалярной величины х вектором Х и заменой коэффициентов матрицами. Широкой стрелкой обозначаются направления действия векторных величин, узкой – скалярных.
для исследования объекта на управляемость, а также для синтеза регуляторов по полному вектору состояния объекта удобно представить модель в так называемой канонической форме управляемости или нормальной форме (см. Приложение 2).
 (3.18)
(3.18)

На рис. 3.6 представлена структурная схема модели в канонической форме управляемости. Очевидно, что система (3.14) и структура на рис. 3.5 являются представлением объекта второго порядка в нормальной форме. Для электродвигателя определена матрица преобразований модели относительно физических координат в модель нормальной формы. Кроме нормальной формы, широко используются каноническая форма наблюдаемости, диагональная и др.
Для исследования реакции системы на внешние воздействия необходимо решить матричное дифференциальное уравнение (3.7). Рассмотрим первоначальное уравнение первого порядка (3.3). Его решение определяется известным выражением
 (3.24)
(3.24)
где х(0) – начальное значение x(t).
В частном случае при u(t)=const в интервале времени от 0 до t интеграл в (3.24) берется довольно легко
 (3.25)
(3.25)
Решение матричного уравнения (3.7) имеет подобный вид [6]
 (3.26)
(3.26)
Отличие (3.26) от (3.25) в его многомерности. Поэтому возникает задача определения экспоненциальной функции от матрицы. Для этого можно использовать два подхода. Первый состоит в разложении функции в степенной ряд
 . (3.27)
. (3.27)
Выражение (3.27) дает приближенное значение функции. Для точного аналитического расчета воспользуемся методом Кэли-Гамильтона. Любую функцию от матрицы можно представить в виде
 (3.28)
(3.28)
где n – размерность квадратной матрицы A и коэффициенты аi определяются из системы уравнений
 (3.29)
(3.29)
где i
= 1,2,… n;
i
– собственные значения матрицы
 (или
корни уравнения (3.23)).
(или
корни уравнения (3.23)).
Аналитическое решение уравнения – довольно громоздкая задача. Поэтому чаще используются машинные методы расчета. Для этого выражение (3.27) представим в следующем виде
 (3.30)
(3.30)
Такое представление значительно упрощает алгоритм расчета.