

119. Электроприводы механизмов, обслуживающих устройства отвода грунта
К электроприводам механизмов, обслуживающих устройства отвода грунта, не предъявляется особых требований по регулированию скорости их исполнительных органов. Большинство механизмов имеет привод от асинхронных двигателей с коротко-замкнутым ротором при непосредственном включении их па полное напряжение судовой сети (прямой пуск). В отдельных случаях для уменьшения пускового тока пуск осуществляется понижением подводимого напряжения путем переключения об-мот-ок статора со звезды на треугольник.
В электроприводе лебедок концевого понтона есть муфты свободного хода барабана; управляют электроприводом с двух постов.— с местного и из рубки управления.
Схемами управления электроприводами лоткоподъемпых лебедок,, поворота клапана грунтового колодца и рамоподъемной лебедки ограничиваются предельные положения лотков, клапана и рамы. В качестве примера на рис. 76 приведена схема электропривода лебедки клапана. Двигатель М реверсируется с помощью контакторов К1 и К2, управляемых кнопками SBI и SB2. Для ограничения угла, поворота клапана установлены конечные выключатели SQ1 и SQ2. Граничные положения клапана сигнализируются лампами ff LI и HL2. Схема электропривода лоткоподъемной лебедки аналогична схеме электропривода лебедки поворота клапана; в нее добавляется только тормозное устройство.
КК2
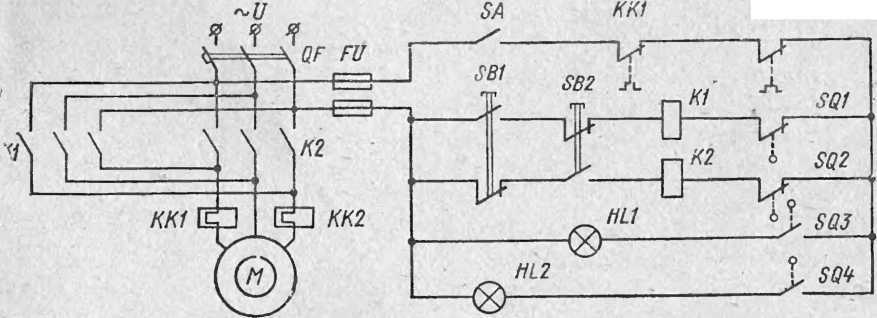
Рис. 76. Схема электропривода лебедки поворота грунтоотводного клапана
117
Для привода рамоподъемной лебедки применяются в большинстве случаев асинхронные двигатели с фазным ротором. Пуск двигателя производится в функции времени или частоты вращения (.рис. 77). Такая схема применена на земснарядах проектов 23-75, 826, 23-110*. Включение и реверсирование двигателя М производятся контакторами /(/ и К2. В верхнем и нижнем положениях рамы привод автоматически отключается конечными выключателями SQ1 и SQ2. Привод оборудован трехфазным электромагнитным тормозом YB. Для автоматического выведения резисторов в цепи ротора служат реле напряжения KV1, KV2 и контакторы КЗ, К4. Подстросчными рези- ' сторами Rl, R2 реле KV1, KV2 настроены па разные напряжения отпускания якорей. Одним из основных элементов! схемы является электромагнит YA. На его якоре закреплена планка, которая с помощью специальной пружины не дает замыкаться размыкающим контактам реле напряжения KVÍ и KV2 при отсутствии напряжения на выводах электромагнита YA. При переключении SAI в первое положение (на спуск или подъем) электромагнит YA питания не получает и двигатель работает с введенными в цепь ротора резисторами. Во втором положении переключателя SAI получает питание электромагнит YA, втягивающий свой якорь и освобождающий контакты реле напря
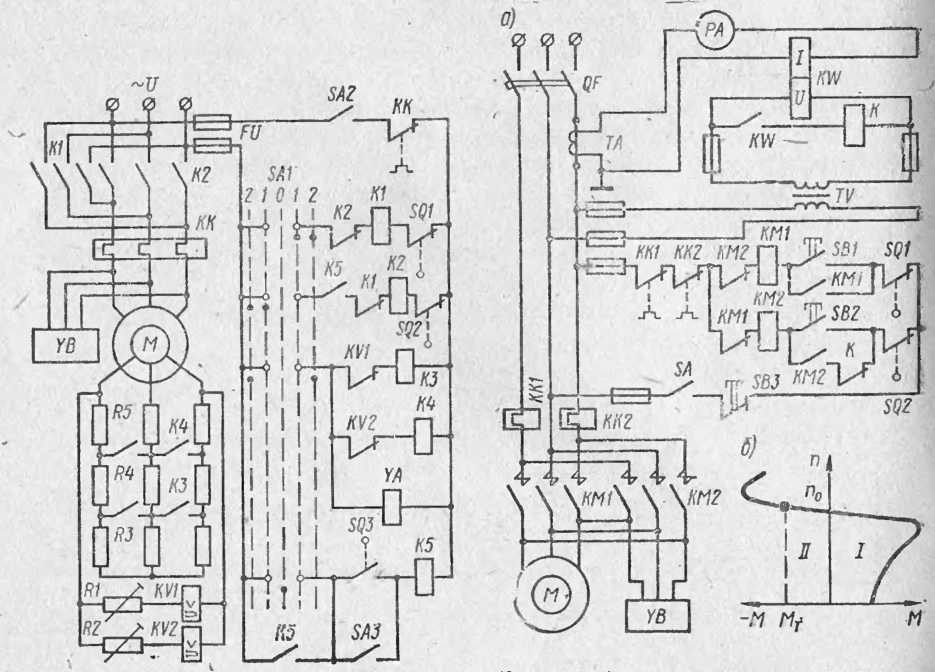
жения KV1, KV2. В момент включения двигателя э. д. с. ротора максимальная. Реле KV1, KV2 срабатывают и своими контактами размыкают цепи питания контакторов КЗ, К4. По мере разгона двигателя э. д. с. уменьшается и достигает значения, при котором реле KV1 отпускает свой якорь. Контакт реле KV1 включает контактор КЗ, шунтирующий первую ступень пусковых резисторов R3. При дальнейшем разгоне двигателя аналогично выводится из цепи ротора вторая ступень пусковых резисторов R4. Резисторы R5 остаются постоянно включенными в цепь ротора для некоторого смягчения механической характеристики электропривода. При увеличении нагрузки на двигатель частота вращения его вала уменьшается, э. д. с. ротора увеличивается и в цепь ротора автоматически вводится одна или обе ступени резисторов.
Схема может ограничивать ослабление натяжения троса при опускании рамы на грунт. Для этого она дополняется конечным выключателем SQ3 и реле К5. Ролик рычага конечного выключателя SQ3 при натянутом тросе нажат и катится по нему. Замыкающий контакт конечного выключателя SQ3 замкнут, реле К5 включено и двигатель можед- работать на спуск рамы. При ослаблении натяжения трос провисает и пружина самовозврата конечного выключателя размыкает контакт SQ3. Опускание рамы автоматически прекращается. Конечный выключатель SQ3 и реле Ко включены последовательно с размыкающим контактом переключателя SA1 для предотвращения самопроизвольного включения привода при последующем натяжении троса. Выключателем SA3 шунтируется конечный выключатель SQ3 при необходимости стравливания троса.
Оригинально решена задача ограничения ослабления натяжения троса в схеме электропривода рамоподъемной лебедкн земснарядов проектов 1519 (рис. 78, а) и Р36. После пуска кнопкой SB2 электропривода на опускание рамы электродвигатель разгоняется в двигательном режиме по механической характеристике в квадранте I (рис. 78,6). Под действием массы рамы частота вращения ротора электродвигателя увеличивается. В момент достижения синхронной частоты вращения п0 э.д. с, ток и вращающий момент электродвигателя становятся равными нулю. Затем при п>по э.д. с. двигателя становится больше напряжения сети питания — двигатель переходит в генераторный режим, создавая тормозной момент Мт, который уравновешивается движущим моментом сопротивления рамы. Разгон прекращается и двигатель работает в режиме рекуперации электроэнергии (квадрант //) с частотой вращения ротора, соответствующей Мт. В момент касания рамой грунта движущий момент сопротивления рамы становится равным нулю и электродвигатель из генераторного режима переходит в двигательный, т. е. от выдачи электроэнергии в сеть к ёе потреблению. На изменение знака мощности реагирует реле обратной мощности
К№ — замыкает свой контакт в цепи промежуточного реле К9 которое, срабатывая, разрывает своим размыкающим контактом цепь контактора КМ2. Двигатель останавливается. Поскольку при пуске на опускание рамы двигатель начинает работать в двигательном режиме, то на период его разгона да п^п0 кнопку 8В2 следует держать нажатой, иначе реле К\У остановит привод. В случае необходимости ослабления натяжения троса (например, для его сматывания) кнопку 8В2 также надо держать нажатой. Трансформатор ТУ применен в схеме,, потому что реле обратной мощности выпускается на напряжение, отличное от напряжения бортовой сети. На схеме: и 5(2.2— конечные выключатели, ограничивающие крайние верхнее и нижнее положения рамы; 5Л — аварийный выключатель. Схема рамоподъемного электропривода земснаряда проекта РЗб аналогична рассмотренной, за исключением двигателя. На земснарядах проекта Р36 (и 892) применены двигатели с фазным ротором и постоянным параллельным подключением к нему резисторов и реактора (см. рис. 45).