

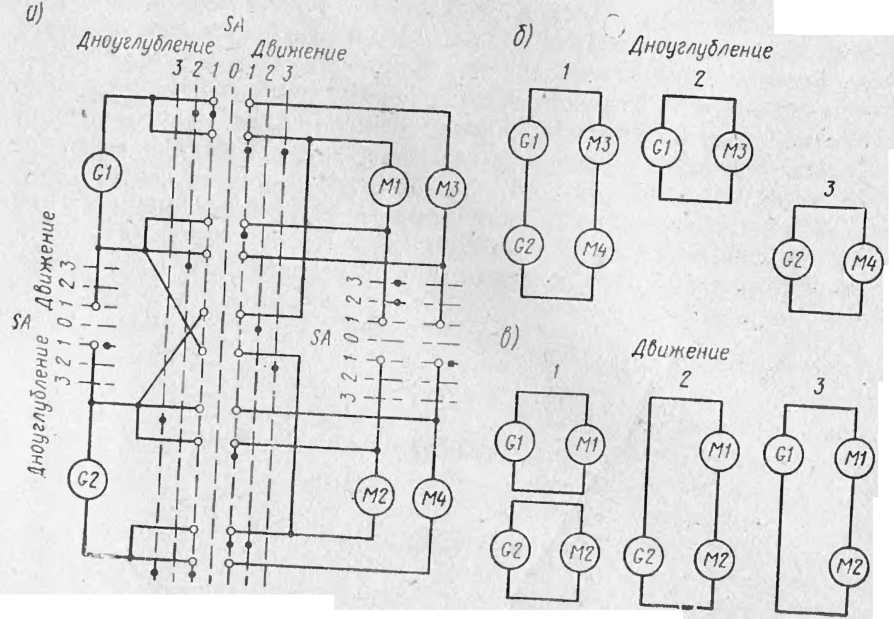
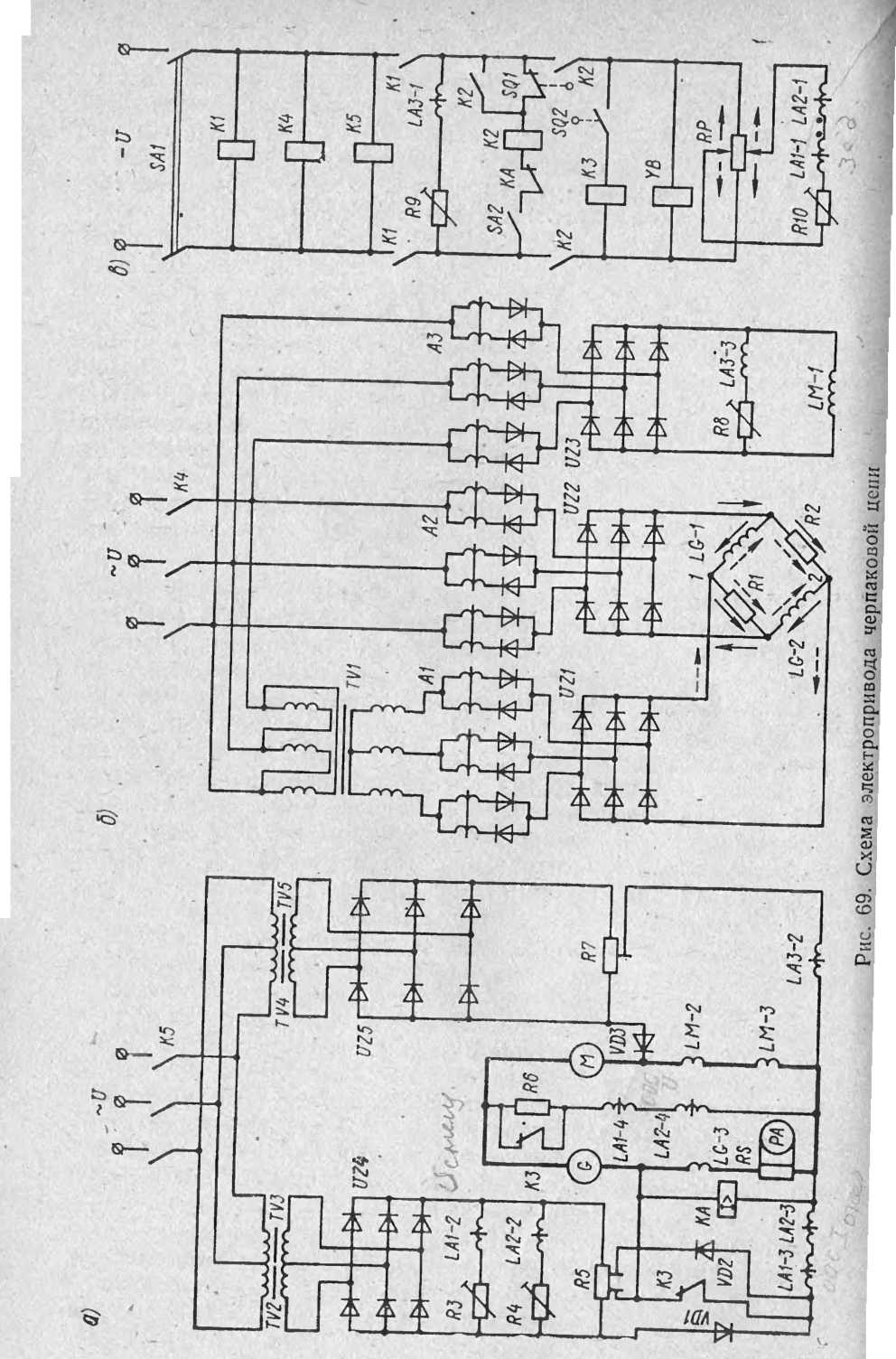
114.Электропривод (системы му г—д) черпаковой цепи.
Стремление сделать земснаряд более маневренным привело к использованию мощности дизель-генераторов как для привода черпаковой цепи, так и для привода гребных винтов. Это позволяет самоходному земснаряду, в отличие от несамоходного, не прибегать к помощи буксира, а самостоятельно переходить с одного места работы на другое.
На ряде земснарядов для привода черпаковой цепи и гребных винтов используется система Г —Д с возбуждением электрических машин от магнитных усилителей (МУ).
115. Электроприводы механизмов рабочих перемещений
Для становых лебедок земснарядов, работающих траншейным способом, и папильонажных лебедок земснарядов, работающих папильонажным способом, применяется регулируемый электропривод. Схема управления электроприводом должна предусматривать возможность ввода управляющего сигнала от системы автоматизации грунтозабора. Поэтому использование, например, системы Г—Д с реостатным управлением возбуждением электрических машин нежелательно, так как для автоматического управления в таком случае необходимо устанавливать сервоприводы реостатов, что не только усложняет систему управления, по и значительно ухудшает се динамические качества.
107
На вновь строящихся земснарядах для становых и папильо-нажиых лебедок, требующих плавного изменения скорости выбирания троса, применяются вентильный и дроссельный электро-приводы или система Г—Д с управлением возбуждением на магнитных или тиристорных усилителях. Использование элек-тромагнитных муфт-скольжения также обеспечивает плавность регулирования скорости исполнительного механизма и возможность автоматизации процесса ее регулирования.
Система управления регулируемых приводов должна стабилизировать заданную скорость движения исполнительного механизма в пределах нормальных нагрузок и ограничивать вращающий момент (и потребляемый ток) предельно допустимым значением, т. е. механическая характеристика электропривода должна быть жесткой в рабочей части и крутопадающей при перегрузке. Частота вращения вниз от номинальной (режим дноуглубления) регулируется при номинальном вращающемся моменте. Частота вращения выше номинальной (уход с прорези) достигается ослаблением поля возбуждения.
Для привода генератора в электроприводе системы Г—Д лебедок рабочих перемещений используют асинхронные двигатели с короткозамкнутым или фазным ротором.
Становые лебедки земснарядов, работающих папильопаж-ным способом, и папильонажные лебедки земснарядов, работающих траншейным способом, а также свайные устройства могут выполняться с односкоростным электроприводом.
В электроприводах механизмов рабочих перемещений (кро-ме движителей) предусматриваются тормозные устройства с электромагнитным, элсктрогидравлическим или пневматическим приводом. Папильонажные и становые лебедки оборудуются муфтами свободного вращения барабана.
Электропривод системы АД-ЭМС. На рис. 71 показаны электрическая и кинематическая схемы электропривода становой лебедки земснаряда проекта 246Б. Барабану / вращение передается от одного из двигателей МЗ или М5 через дифференциальный редуктор 3 и шестеренчатую передачу 2. Лебедка оборудована двумя гидравлическими'тормозами 4 и 5, приводимыми электродвигателями М2 и М4. Свободный ход барабана обеспечивается кулачковой муфтой 6 с приводом от двигателя М1 При уходе с прорези и установке на место работы привод барабана осуществляется от двигателя МЗ. В режиме «дноуглубление» приводом барабана является система АД— с>МС, состоящая из агрегата двигатель М5 — электромагнитная муфта скольжения УС, устройства автоматического регулирования частоты вращения А, тахогенератора ЗД, осуществляющего обратную связь по частоте вращения исполнительного механизма ИМ, и регулятора возбуждения R1 (потенциометра), задающего ток возбуждения муфты, а следовательно, и частоту вращения ее выходного вала. Переключателем SА2 муфта вклю-

Рпс 71 Электрическая (а) и кинематическая (б) схемы электропривода лебедки рабочего перемещения с электромагнитной муфтой скольжения
чается или на автоматическое управление от А, или на ручное с помощью регулятора возбуждения R2 и питанием от сети постоянного тока. Двигатели управляются кнопками $В и контакторами К У кнопок управления БВ! и 5Б2 двигателем Ш муфты свободного хода нет самоблокирования вспомогательны-ми контактами контакторов К1 и К2, поэтому кнопки должны быть нажаты до отключения схемы выключателями конечных положений муфты. Защита двигателей от перегрузок осуществляется тепловыми реле КК.