

12.Теорема про додавання співнапрямленних обертальних рухів тіла навколо паралельних осей (з доведенням).
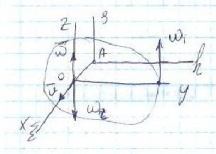
Теорема : сукупність двох обертальних рухів відносно паралельних осей є миттєвий обертальний рух навколо осі яка ділить відстань між складовими осями повороту обернено-пропорційні величинам кутових швидкостей внітрішним чином , якщо кутові швидкості спів напрямлені та зовнішнім чином якщо протилежні. Результуюча кутова швидкість дорівнює векторній сумі кутових швидкостей.
Перененосна швидкість :
Ve=w1 * AM
Відносна швидкість:
Vr= w2 * OM

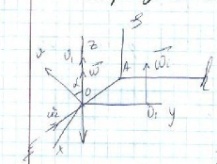
14.Теореми про додавання обертального та поступального рухів тіла (з доведенням). Кінематичний гвинт
Вектори кут. Шв. та швид.- перпенд икулярні
AEhs- нерухома СК, Axyz- рухома, V – швидк. СК Axyz, w- миттєва кут. Шв.
V (вект) - момент пари оберт.
V=001*w1(вект), V=|001|*w1
{w1,w2} – пари обертання, |001|=V/w – миттєвий оберт рух
Th- сукупність оберт та поступальних рухів при умові перпендикулярності веектора миттєвих кутових шв. і вектор швид. поступ. руху і миттєвим оберт. Рухом
|
{w1; V0} ~ { w(вектр), Р – МЦШ} |
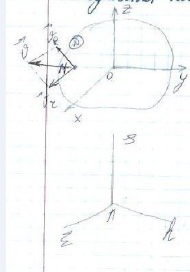
Векторна кутова швидкість та швидкість не перпендикулярна
AEhs- нерухома СК, Оxyz- рухома, Д – митт. Оберт рух
W не дорівнює V
VЄ Оxyz , V=V1+V2(вектр), V1 перпендикулярно V2
Кутміж w I V = a
V1=Vcosa, V2=Vsina
V1- шв. поступ руху
V2- момент пари обертання
|001|=v2/w1=Vsina/w – плече пари оберт.
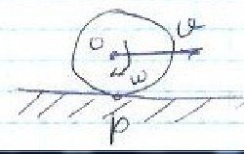
Рух тіла яке є сукупн. Миттєвого оберт. Руху і миттєво – патун. Руху паралельно з веторами швидкостей назив. Кінемат. Гвинт . Таким чином у кожному випадку реаліз. Кінемат. Рух.
Теорема : Сукупність поступального руху та миттєво-оберт руху тіла з не перпендикулярним вектором швидкосте та кутов. Швидк. Є кінетичним гвинтом
15.Додаванняпоступальнихрухів твердого тіла
Д-тіло, Оxyz – рухома СК, V2 – швидкість поступального руху тіла по СК Oxyz, V1 – рух СК OxyzyCK АЕh, Нехай т.М – довільна точка тіла Д , М- аналог. Рух у АEh, Vм=Ve+Vr(вектори) Ve-переноснийрух Vr- відносний рух Переносний
рух М в Oxyz:
Ve=V1 Відносний рух М в СК Oxyz: Vr = V2 Тоді Vм=V1+V2 М – довільна будь-яка точка тіла Д має такуж швидкість, отже тіло Д здійснює поступальний рух. Теорема: сукупність двох поступальних рухів твердого тіла є постопульний рух швидкість якого дорівнює векторній сумі складових рухів |
16. Закони Ньютона, принцип суперпозиції.
Динаміка – це розділ теоретичної мех. В якому вивчаються властивості механічних рухів з урахуванням факторів, що їх викликають. Такими факторами є сили.
Закони Ньютона виконуються в інерціальних системах відліку – система в якій тіло здійснює рівномірний прямолінійний рух.
1-ий закон Ньютона:
Ізольована матеріальна точка (тіло) зберігає стан спокою або рівномірного прямолінійного руху до того часу, поки дія інших тіл не виведе її з цього стану.
Ізольована матеріальна точка – це точка, взаємодію якої з іншими тілами можна знехтувати. Закон показує, що причиною зміни руху є взаємодія тіл. Взаємодія може бути контактна або через силові поля.
Сила – це фізична величина, яка характеризує міру механічної взаємодії.
2-ий закон Ньютона:
Зміна кількості руху матеріальної точки пропорційна прикладеної до неї сили і відбувається у бік дії сили.
 – кількість
руху мат точки.
– кількість
руху мат точки.
 – основний
закон динаміки;
– основний
закон динаміки;
 аса
– фізична величина, яка визначає вміст
речовини у тілі і характеризує його
інерційні та гравітаційні властивості.
аса
– фізична величина, яка визначає вміст
речовини у тілі і характеризує його
інерційні та гравітаційні властивості.
3-ій закон Ньютона:
Усяка дія породжує рівну і протилежно напрямну протидію.
«Принцип суперпозиції» або закон незалежності дії сили:
Прискорення точки, яке викликається декількома силами дорівнює векторній сумі прискорень, кожне з яких викликається окремо взятою силою.