

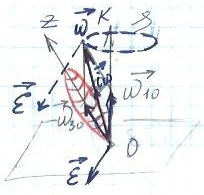
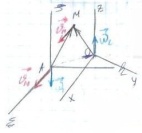
8.Регулярна процесія і кутове прискорення тіла, що має нерухому точку.
Регулярна
процесія.Означення:
регулярною процесієюназиваєтьсярухтіла,
якиймаєнерухому точку, при якому кут
нутаціїзалишаєтьсясталим, а кути
процесії та власногообертання є
лінійнимифункціями часу.













Визначимо
вектор
 інакше.
Подаморухтіла як складний:
інакше.
Подаморухтіла як складний:
Переносний з

 навколо
навколо
Відносний - власнеобертання з кутом


Абсолютнийрух:

У цьомувипадку

 кутовашв.
рух. СК.
кутовашв.
рух. СК.







У випадкурегулярноїпроцесії

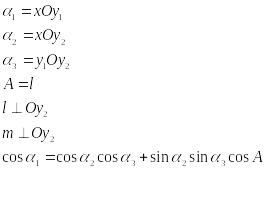
9.Способи визначення напрямних косинусів між осями систем координат.
Напрямні косинуси координатних осей
Спосіб: формули сферичної тригонометрії
Можна визначити за допомогою формулами сферичної тригонометрії або матрицями переходу.

 А
– лінійний кут двогранного кута при
осі ОХ
А
– лінійний кут двогранного кута при
осі ОХ
![]()
Матриці переходу:

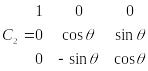
Перехід
:
![]()
![]()
![]()
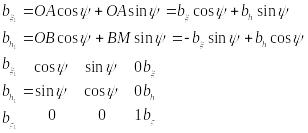
- матриця переходу від
Якщо
![]() ортим.
ортим.![]()
![]() орти-
орти-![]()
10.Теорема про додавання обертальних рухів тіла навколо перетин них осей (з доведенням).
Додаванняобертальнихрухів твердого тіланавколоперетинних осей.

 -нерухома
СК
-нерухома
СК
 -рухома
-рухома
 -
миттєвий кут швидкостей
-
миттєвий кут швидкостей
 -
миттєвийобертальнийрух з
-
миттєвийобертальнийрух з
 у
СК
у
СК

Довільнат.


 -
складнийрух, двіскладові.
-
складнийрух, двіскладові.

Відноснийрух

Переноснийрух




Оскільки
т.
 -
довільна, та за такою формулою визначитишв.
будь-якої точки
-
довільна, та за такою формулою визначитишв.
будь-якої точки тіло
-
здійснюєобертальнийрух.
тіло
-
здійснюєобертальнийрух.
Теорема: сукупністьдвохобертальнихрухівтілавідносноперетинних осей є миттєвийобертальнийрух з кутовоюшвидкістю, яка збігається з діагоналлюпаралелограмапобудованого на кутовихшвидкостяхскладовихрухів.
11.Теорема про додавання обертальних рухів тіла які утворюють пару обертань (з доведенням).
Теорема 11 : Сукупність двох обертальних рухів тіла відносно перетинних осей є миттєвий обертальній рух з кутовою швидкістю, яка збігається з діагоналлю паралелограма побудованого на кутових швидкостях.
Пара обертань – це рух твердого тіла який є сукупністю двох обертальних рухів навколо паралельних осей з рівними за величиною і протилежно-напрямленими кутовіми швидкостями.
![]() -
Нерухома
система координат
-
Нерухома
система координат
Oxyz – рухома, має ω1 у рухомій СК
D – має кутову швидкість ω2 у Oxyz
ω1= -ω2
Довільна т.М Є D.
М – складний рух/
VM =Ve+Vr
Переносний
рух відносно
![]()
Ve = ω1 * АМ
Відносний рух у СК Oxyz
Vr = ω2 * ОМ
Підставимо:
VМ = ω1 * АМ + ω2 * ОМ
ω2 = - ω1
VМ = ω1 * (АМ – ОМ) = ω1 * АО
VМ = ω1 * АО = - АО * = ОА * ω1
Аналогія:
ω1 – F
VМ = ОА * ω1
Момент пари обертань
VМ – М (F)
Оскільки т.М довільна, то за аналогією =>D – здійснює миттєво поступальний рух.
Т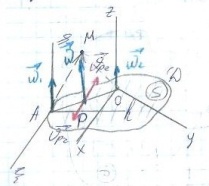 еорема.
Тіло,
яке приймає участь у парі обертань
здійснює поступальний рух, швидкість
якого дорівнює моменту пари обертань.
еорема.
Тіло,
яке приймає участь у парі обертань
здійснює поступальний рух, швидкість
якого дорівнює моменту пари обертань.
Додавання обертальних рухів навколо паралельних осей
![]() -
нерухома СК
-
нерухома СК
Oxyz– рухома СК, ω1 в нерухомій СК
D -ω2в рухомій СК
ω1 || ω2 (ω1 ,ω2 – не пара обертань)
М – довільна точка, складний рух
VM =Ve+Vr