

Осциллограммы работы микросхемы fm24c256-se

Вывод 6
(SCL)
Вывод 5
(SDA)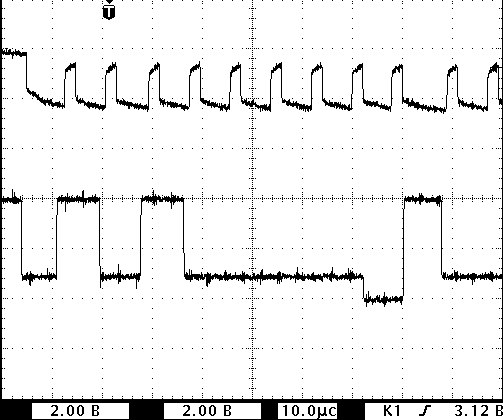




Рисунок 4 - Осциллограмма работы МС в режиме чтения
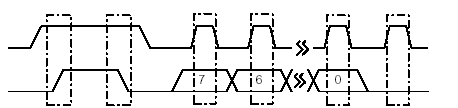

Рисунок 5 - Протокол передачи данных в МС РП

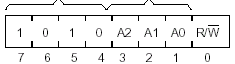
Идентификатор памяти – код микросхемы FM24C256_SE, используемый для обращения к данной МС.
Адрес устройства на шине – адрес конкретной МС, к которой в этот момент происходит обращение.
Импульс записи/чтения R/W определяет, какое действие в данный момент должна выполнять микросхема:
при R/W = 1 – чтение; при R/W = 0 – запись.
Рисунок 6 - Расшифровка данных, переданных в МС РП.
При выдаче на индикатор сообщений ERR69 заменить микросхему настроечной памяти поз. D6.
При выдаче на индикатор сообщений ERR80 … ERR86, ERR88 … ERR105 провести настройку соответствующего параметра крана.
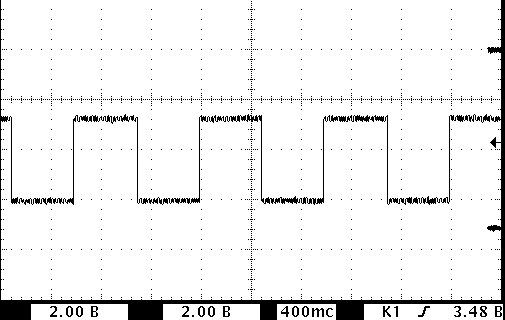

Рисунок 7 - Осциллограмма работы часов (микросхема поз. D1 DS1307ZN) контроллера.
Осциллограмма работы микросхемы hsdl3612-008
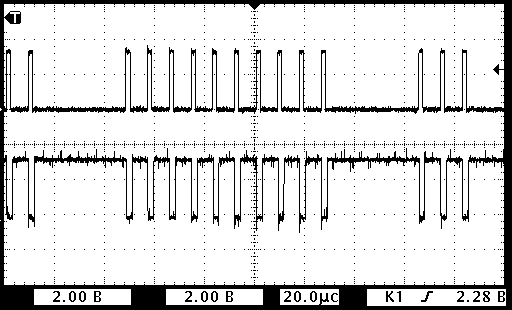

Рисунок 8 - Осциллограмма режима передачи информации из памяти контроллера (микросхема поз. D11) в считыватель телеметрической информации СТИ-3.
3 Блок питания (бп)
3.1 Устройство и принцип работы бп
Блок питания (БП, БП-01, см. рисунок 9) предназначен для преобразования переменного напряжения 220 В частотой 50 Гц в постоянное напряжение 24В± 10%, которое используется для питания блоков и датчиков ограничителя.
В состав блока питания входят:
- сетевой фильтр;
- трансформатор;
- двухполупериодный выпрямитель.
Кроме собственно блока питания, в корпусе конструктивно размещена (кроме БП, входящего в состав ограничителя модификации ОНК-160Б-04, -33) плата контроллера башенного крана (КБК) (модификация БП-01).

Рисунок 9
Переменное напряжение 220В подается на клеммы «220-1», «220-2» жгута БП.
Через предохранитель F1 и тумблер S1 напряжение поступает на сетевой фильтр ZL1, защищающий прибор от помех по питанию, а затем на понижающий трансформатор T1. Со вторичной обмотки трансформатора напряжение поступает на выпрямитель VD1–VD4 и сглаживающий фильтр C1–C3. Постоянное напряжение +24 В с выпрямителя используется для питания КБК, датчиков и блоков ОНК.
Входящий в состав БП-01 контроллер башенного крана (КБК) предназначен для приема сигналов с датчиков ветра, вылета, датчика усилия цифрового, их обработки и передачи по запросу в БОИ. Также через блок питания осуществляется связь БОИ с БКР или КБК, расположенном в нижнем шкафу управления.
На плате КБК формируются напряжения ±5В для питания БОИ, датчика ветра, ДУЦ в вариантах ОНК с датчиком усилия цифровым ЛГФИ.404176.013 (ОНК выпуска до 2007 года), и напряжение +3,3 В для питания микроконтроллера и датчика вылета.
Напряжение 24В через фильтр C1, C5,,,C7, L1, C9,C12 и ограничительный диод VD12 подается на вход преобразователя D3 (AM3TW-2405S), с выхода которого снимается стабилизированное напряжение ±5 Вольт. Далее напряжение поступает на фильтр, состоящий из двух конденсаторов С18 и С21. На плате КБК напряжение +5 Вольт используется для питания приемопередатчика CAN – канала.
Напряжение +3.3 В формируется из +5 В в стабилизаторе с датчиком контроля напряжения ДКН D4 ( TPS7333QD). Работа ДКН описана выше.
Напряжение 3,3 Вольт для питания датчиков перемещения (ДП) формируется в источнике опорного напряжения, выполненном на операционном усилителе D5 (TLV2471IDBV), резисторе R16 и диодах VD10, VD11. Напряжение, снимаемое с потенциометров ДП через делители напряжения R2, R5, R3, R6, R4, R7 поступает на вход аналого-цифрового преобразователя микроконтроллера.
Для подавления высокочастотных помех в измерительных цепях ДП служат конденсаторы С2-С4. Диоды VD2-VD5 служат для защиты входов микроконтроллера от отрицательных выбросов напряжения и выбросов свыше 3,3 Вольт.
С датчика ветра импульсы частотой, пропорциональной скорости ветра, и амплитудой 5 Вольт через нагрузочный резистор R14 и делитель напряжения R8, R9 поступает на вход порта ввода-вывода микроконтроллера.
Микроконтроллер MSP430F149 подает управляющие сигналы на CAN приемопередатчик D1 (TJA1050), который преобразует их в CAN сигналы для обмена данными с другими блоками и датчиками, входящими в ОНК. Форма сигнала на выходе приемопередатчика показана рис.2.