

Билет №10
1 Вопрос . Определение основных усилий при перемещении грузов
А. Передвижение груза волоком по горизонтальной плоскости и в желобчато-клинчатых направляющих.
Сопротивление передвижению или тяговое усилие Р (рис. 2.10) определяется из уравнения
 . (2.1)
. (2.1)

Рис. 2.10. Схема передвижения груза волоком по горизонтальной плоскости
Здесь и далее Q кГ – вес груза на длине участка передвижения; в него в конвейерных установках входят вес деталей, вес ленты, поддонов и других приспособлений, применяемых при транспортировании деталей; f – условный коэффициент трения. Ориентировочно при:
t °С = 400700° f = 0,60,7,
t °С = 700800° f =0,70,8,
t °С = 8001000° f = 1.
β1 – поправочный коэффициент, предусматривающий возможность частичного спекания поверхности деталей с подом или направляющими, искривление направляющих под действием температуры и пр. Значения β1 на основании практических данных колеблются в пределах от 1 до 4.
При движении тела в клинчатых направляющих (рис. 2.11) сила трения N·f на обеих трущихся поверхностях возникает только в направлении движения, т.е. нормально к плоскости чертежа.

Рис. 2.11. Схема расположения груза в желобчатых
направляющих (поперечный разрез)
На основании принятых обозначений имеем:
 , (2.2)
, (2.2)
где 2α – угол между стенками желоба.
Отсюда реакция каждой опоры
 ,
,
а сила сопротивления
 , (2.3)
, (2.3)
т.е.
трение в желобе больше, чем на плоскости
в отношении
 раз.
раз.
Б. Перемещение груза на катках
При определении тягового усилия Р принимаем вес груза и тары Q, вес тележки G и вес всех катков n·q сосредоточенными на одном катке (рис. 2.12).

Рис. 2.12. Схема перемещения груза на катках
Равномерное перемещение тележки осуществляется перекатыванием катка по рельсу В – В парой сил Р и Ft, где Ft – сила трения скольжения, приложенная в точке А и равная по величине силе Р. Сила Ft является силой трения покоя и равна
 ,
,
где f0 – коэффициент трения покоя (или коэффициент сцепления катка с рельсом).
Пара
сил (Р·Ft),
под действием которой каток перекатывается
по плоскости, создаёт момент
 ,
где D
– диаметр катка. При равномерном движении
тележки этот момент равняется по
абсолютной величине моменту сопротивления
перекатывания катка и моменту сил трения
в цапфе
,
где D
– диаметр катка. При равномерном движении
тележки этот момент равняется по
абсолютной величине моменту сопротивления
перекатывания катка и моменту сил трения
в цапфе
 (2.4)
(2.4)
где n – число катков;
q – вес катка, кГ;
k – коэффициент трения качения катков о направляющие; см;
f – коэффициент трения скольжения в цапфах;
d – диаметр цапфы, см;
β – коэффициент, учитывающий трение о реборды и равный: при подшипниках качения β = 22,5; при подшипниках скольжения β = 1,21,5.
При малых значениях G и q последним можно пренебречь:
 . (2.5)
. (2.5)
Выражения (2.4) и (2.5) могут быть с некоторыми преобразованиями использованы и в других видах перемещения на катках и по каткам.
Если
сила Р
приложена не в точке О катка, а в какой-либо
другой точке, например, в точке О1
на расстоянии l
от рельса, необходимо в двух последних
уравнениях величину
 заменить величиной l.
заменить величиной l.
На рис. 2.13 изображена группа цилиндрических деталей радиуса R, перекатываемых по поду печи действием усилия Р. При перекатывании возникают сопротивления как от сил трения качения цилиндров по поду печи, так и от сил трения скольжения между соприкасающимися поверхностями цилиндров при противоположном направлении вращения друг относительно друга.

Рис. 2.13. Схема перемещения цилиндрических деталей
Усилие Р определяется из уравнения
 ,
,
где q – вес детали, кГ;
n – число деталей;
R – радиус деталей, см;
f – коэффициент трения скольжения между деталями;
k – коэффициент трения качения между направляющими пода печи и деталями, см.
Отсюда
 . (2.6)
. (2.6)
Очевидно, что перекатывание деталей без проскальзывания их по поду печи будет возможно, если
 ;
;
в противном случае детали перемещаются по поду печи без перекатывания.
Перемещаемые детали испытывают давление, постепенно убывающее от конца, к которому приложено толкающее усилие Р.
В. Блоки и звёздочки.
Блоки разделяются на неподвижные, или направляющие, и подвижные. Блоки с неподвижными осями называются направляющими потому, что служат только для изменения направления гибкого органа: гибкие элементы (цепь, канат) лишь огибают их обод на некоторый угол; блок или звёздочка не передаёт крутящего момента на свою ось.
Жёсткость каната при огибании блока обусловливается тем, что при набегании канат не сразу принимает кривизну блока, а при сбегании не сразу выпрямляется (рис. 2.14). При набегании ветвь каната смещается во внешнюю сторону на некоторую величину m от вертикали, а при сбегании – на величину n от вертикали во внутреннюю сторону.
Натяжения сбегающей и набегающей ветвей будут различными, натяжение сбегающей ветви будет больше на некоторую величину W , чем натяжение набегающей (см.п. «е»).
Оси
направляющих блоков помещены в
закреплённых опорах. Скорости v
и пути h,
проходимые набегающей и сбегающей
ветвями, в данном случае одинаковы.
Усилия Q
и P0
без учёта сопротивлений равны друг
другу, т.е.
 .
С учётом сопротивлений в подшипниках
блоков и жёсткости гибкого элемента
.
С учётом сопротивлений в подшипниках
блоков и жёсткости гибкого элемента
 .
Отсюда КПД блока
.
Отсюда КПД блока
 . (2.7)
. (2.7)

Рис. 2.14. Контур гибкого элемента при огибании направляющего блока
Подвижные блоки в отличие от неподвижных могут перемещаться вместе со своими осями в пространстве.
Подвижные блоки применяются для выигрыша в силе или в скорости.
Г. Блок для выигрыша в силе.
К
оси блока (рис. 2.15) приложена сила Q.
Путь h,
проходимый силой Q,
в
два раза меньше пути
 ,
проходимого силой Р;
скорость точки приложения силы Q
вдвое
меньше скорости точки приложения Р.
,
проходимого силой Р;
скорость точки приложения силы Q
вдвое
меньше скорости точки приложения Р.
Без
учёта вредных сопротивлений
 ;
с учётом жёсткости гибкого элемента и
сил трения в осях
;
с учётом жёсткости гибкого элемента и
сил трения в осях
 ;
;
и КПД
 (2.8)
(2.8)

Рис. 2.15. Блок для выигрыша в силе
Д. Блок для выигрыша в скорости.
К
оси блока (рис. 2.16) приложена движущая
сила Р;
груз Q
подвешен к свободной ветви. Путь h
точки приложения P
в два раза меньше пути точки приложения
Q;
 ,
а скорость точки приложения P
в
два раза меньше скорости точки приложения
Q.
,
а скорость точки приложения P
в
два раза меньше скорости точки приложения
Q.
Без учёта вредных сопротивлений
 ;
;
с учётом сопротивлений
 ;
;

и КПД
 . (2.9)
. (2.9)

Рис. 2.16. Блок для выигрыша в скорости
Значения коэффициента сопротивления k и КПД η для одиночных блоков приведены в табл. 2.1.
Е. Сопротивление на кривых с цепным тяговым органом.
Все случаи транспортирующих устройств электрических печей с цепным тяговым органом можно привести к двум, когда тяговый орган (цепь, цепное полотно или сетчатая лента) огибает:
а) вращающийся или отклоняющий блок, звёздочку или барабан;
б) ведущий барабан или ведущую звёздочку.
При огибании тяговым органом вращающейся звёздочки, барабана и блока общее сопротивление Wотк складывается из трёх составляющих:
жёсткости тягового органа W’ (трение в шарнирах цепи при повороте звеньев друг относительно друга во время набегания цепи на звёздочку);
трения W’’ в ступице звёздочки или на цапфах её оси;
жёсткости W’’’ тягового органа при сбегании со звёздочки:
 .
.
Таблица 2.1
Значения k и η для одиночных блоков
Тип блока и опор |
Дуга охвата 2·α = 900 |
Дуга охвата 2·α = 1800 |
Калиброванная сварная цепь на гладком блоке с опорами скольжения Калиброванная сварная цепь на зубчатом блоке с опорами скольжения Пластинчатая шарнирная цепь на звёздочке с опорами скольжения То же с опорами качения
Стальной проволочный канат на гладком блоке с опорами скольжения То же с опорами качения |
k = 1,03 η = 0,94
k = 1,04 η = 0,94
k = 1,04 – k = 1,025 – k = 1,04 η = 0,96
k = 1,02 η = 0,985 |
k = 1,04 η = 0,926
k = 0,08 η = 0,926
k = 1,06 η = 0,95 k = 1,03 η = 0,95 k = 1,05 η = 0,95
k = 1,03 η = 0,98 |
Натяжение сбегающей ветви при отклоняющей звёздочке или барабане превышает натяжение набегающей ветви на сумму приведённых к радиусу звёздочки (барабана) сопротивлений (рис. 2.17):

где k' > 1.
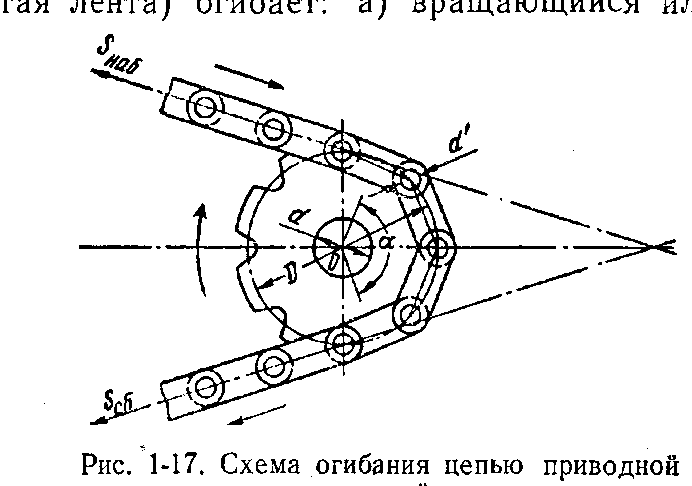
Рис. 2.17. Схема огибания цепью приводной или отклоняющей звёздочки
Практически величина сопротивления на звёздочке или барабане Wотк составляет от 5 до 10% Sнаб, т.е.
 . (2.10)
. (2.10)
Сопротивление на приводной звёздочке (барабане), обусловленное только жёсткостью тягового органа, составляет от 3 до 5% от суммы натяжений в набегающей и сбегающей ветвях:
 . (2.11)
. (2.11)
Сопротивление в ступице звёздочки или барабана учитывается КПД привода конвейерной установки.